DB5883指南针模块介绍
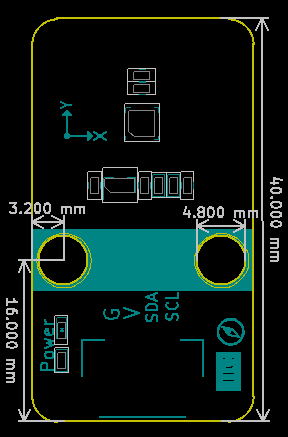
模块实物图

概述
DB5883是一种多芯片三轴磁传感器。这表面贴装,小型芯片集成了磁传感器信号条件专用集成电路,针对高精度应用,如在无人机,机器人,移动和游戏的罗盘,导航和个人手持设备。DB5883L是基于我们最先进的,高分辨率,磁阻技术授权自霍尼韦尔AMR技术。与定制设计的16位ADC ASIC,它提供的优点低噪音,高精度,低功耗,抵消和温度补偿。QMC5883L使1度到2度罗盘航向精度。
功能特点:
- 采用先进的AMR技术
- 拥有16位ADC
- 分辨率达到0.2uT
- 可实现1°航向精度
- 数据更新频率可达200Hz
- 宽幅工作电压(2.16V to 3.6V)
- 低功耗特征(75uA)
- 尺寸小330.9mm³ 采用LGA封装
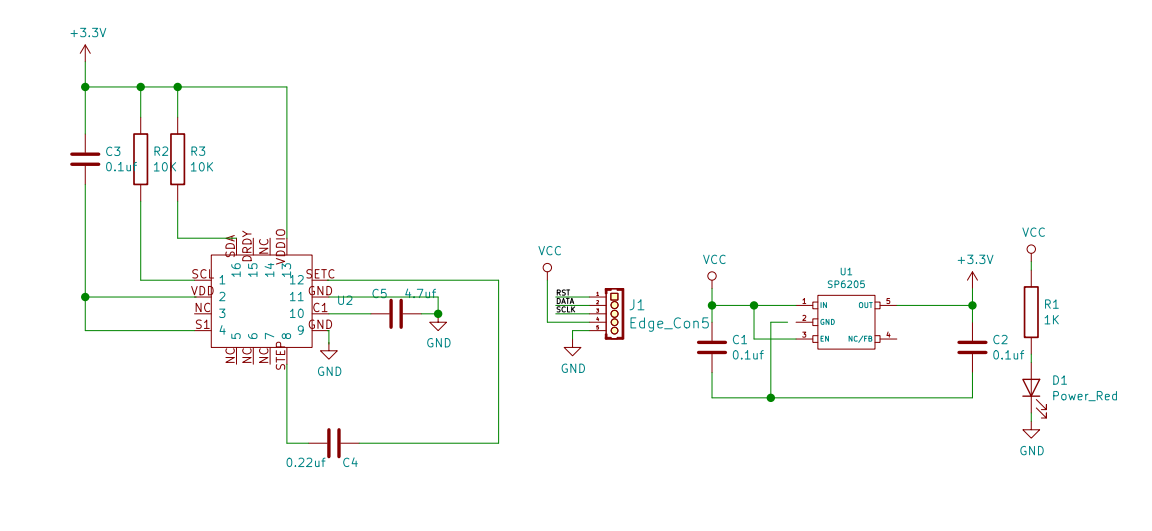
模块参数
-
工作电压:VDD供电电压为2.5V±5%、3.0V±5%、3.3V±5%;
-
GND:地
-
SCL:IIC通信模式时钟信号
-
SDA:IIC通信模式数据信号
-
SETC:S/R电容器(c2)电容连接-驱动端
-
SETP:置位/复位带正-S/R电容(C2)连接
-
NC:无连接
-
DRDY:数据准备,中断引脚。内部被拉高。当数据为于输出寄存器上时会在低电位上停250u sec
-
ADC:16位的模数转换器
-
Clock Gen.:内部振荡器,用于内部操作
-
QMC5883L有两种工作模式:连续测量模式和待命模式。
数据手册
机械图
寄存器如下
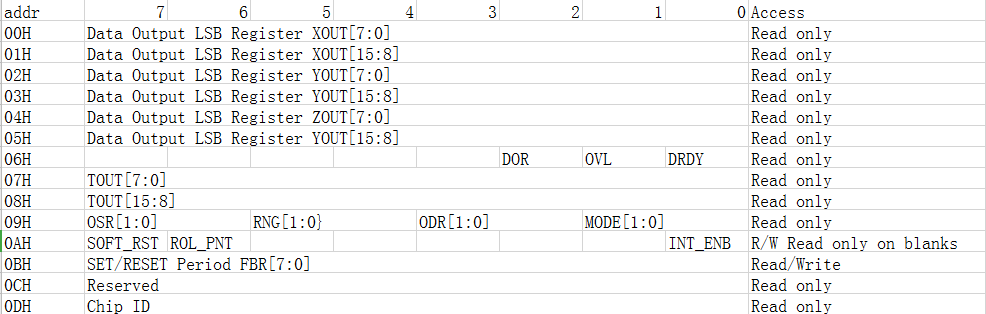
00H~05H是数据寄存器,分别存放的是三轴传感器的X、Y和Z轴的值,每两个寄存器构成一个轴的高低字节,表示范围:-32768~32768。
06H是状态寄存器,当传感器数据已测量完毕并准备好DRDY位被置“1”,数据寄存器一旦被读取,DRDY位将被置“0”。OVL是溢出位,当有任意一个轴的测量值超过范围,OVL将被置“1”,当下一次测量不超测量范围时,OVL将会被置“0”。当处于连续模式下测量数据被跳过时DOR被置“1”,而当数据寄存器被读写后置“0”。
07H~08H存放的是QMC5883L内置的温度传感器的输出数据。这里需要注意的是温度传感器的增益出厂前校正过,但偏移没有得到补偿,所以,温度传感器测得的相对值是准确的。温度系数100 LSB/℃。
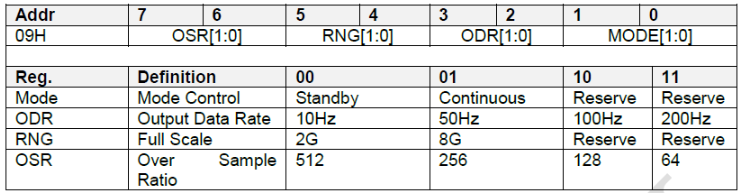
09H~0AH是QMC5883L的控制寄存器。09H设置工作模式(MODE)、数据输出更新频率(ODR)、传感器测量范围(RNG)以及过采样率(OSR)。0AH设置中断使能
(INT_ENB)、点翻转使能(POL_PNT)以及软复位(SOFT_RST)。09H寄存器的设置如下图所示:
INT_ENB被置“0”时,中断引脚(即DRDY)将被使能,置“1”时中断被禁止。
ROL_PNT被置“0”时,I2C总线接口将不会自动在00H~06H间翻转,置“1”时自动翻转。
SOFT_RST被置“1”时对QMC5883L进行软复位,软复位可以发生于任何模式下的任何时段,软复位发生后所有寄存器将会被置默认值。
0BH控制QMC5883L的设置/复位时间,推荐值是设定为0x01。
0DH是器件标识寄存器,其值为0xFF。