PantherTank5.0的图形化编程
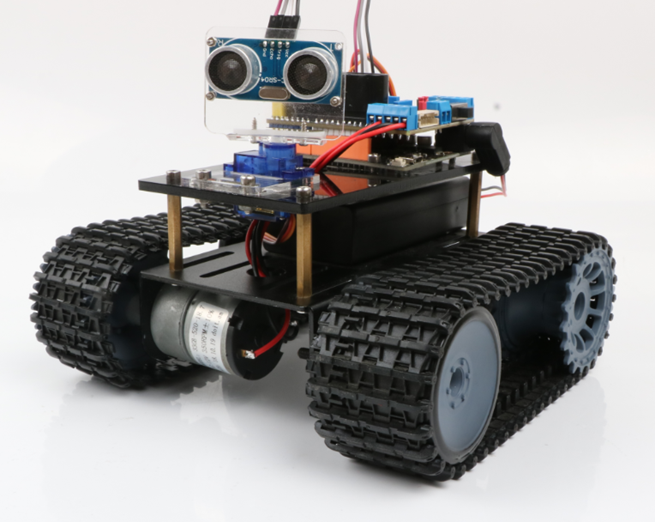
PantherTank5.0简介
PantherTank5.0以ATMEGA328P-PU为主控芯片,H450作为电机驱动芯片的一款多功能履带式车。与传统小车相比,PantherTank5.0搭载无线控制(蓝牙、红外遥控)等,能够自动避障。当然,Maker也可通过自己的idea进行增减其他功能,如添加自动循迹、PS2游戏手柄、添加wifi控制,机械臂等。
产品特点
- 大功率全金属减速电机
- 一体充压成型套件,易安装,更紧密
- 2000mA/7.4V可充电锂电池,续航更久,动力更足
- 2颗RGB方向灯
- 具备蜂鸣器
- 支持红外遥控器控制
- 支持手机app控制
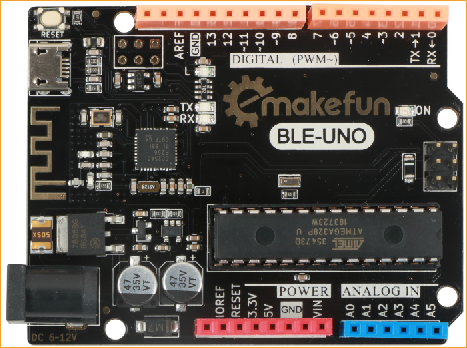
主控板BLE-UNO
在PantherTank5.0,我们使用了BLE-UNO作为主控板。它有14个数字输入/输出引脚(其中6个可用作PWM输出)、6个模拟输入、1个16MHz陶瓷谐振器、1个USB连接、1个电源插座、1个ICSP头和1个复位按钮。它包含了支持微控制器所需的一切。只需通过USB电缆将其连至计算机或者通过AC-DC适配器或电池为其供电即可开始。除此之外,还板载了CC2540蓝牙模块,可实现蓝牙通信等。
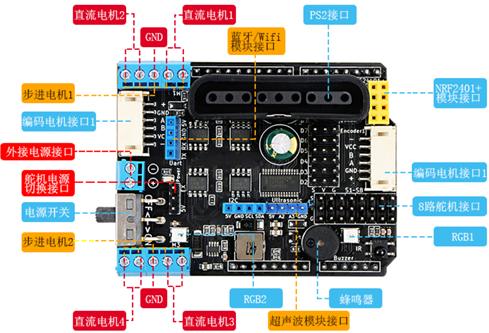
扩展板MotorDriverBoard
扩展板示例图:
使用MagicBlock为PantherTank编写上传程序 进入MagicBlock使用教程
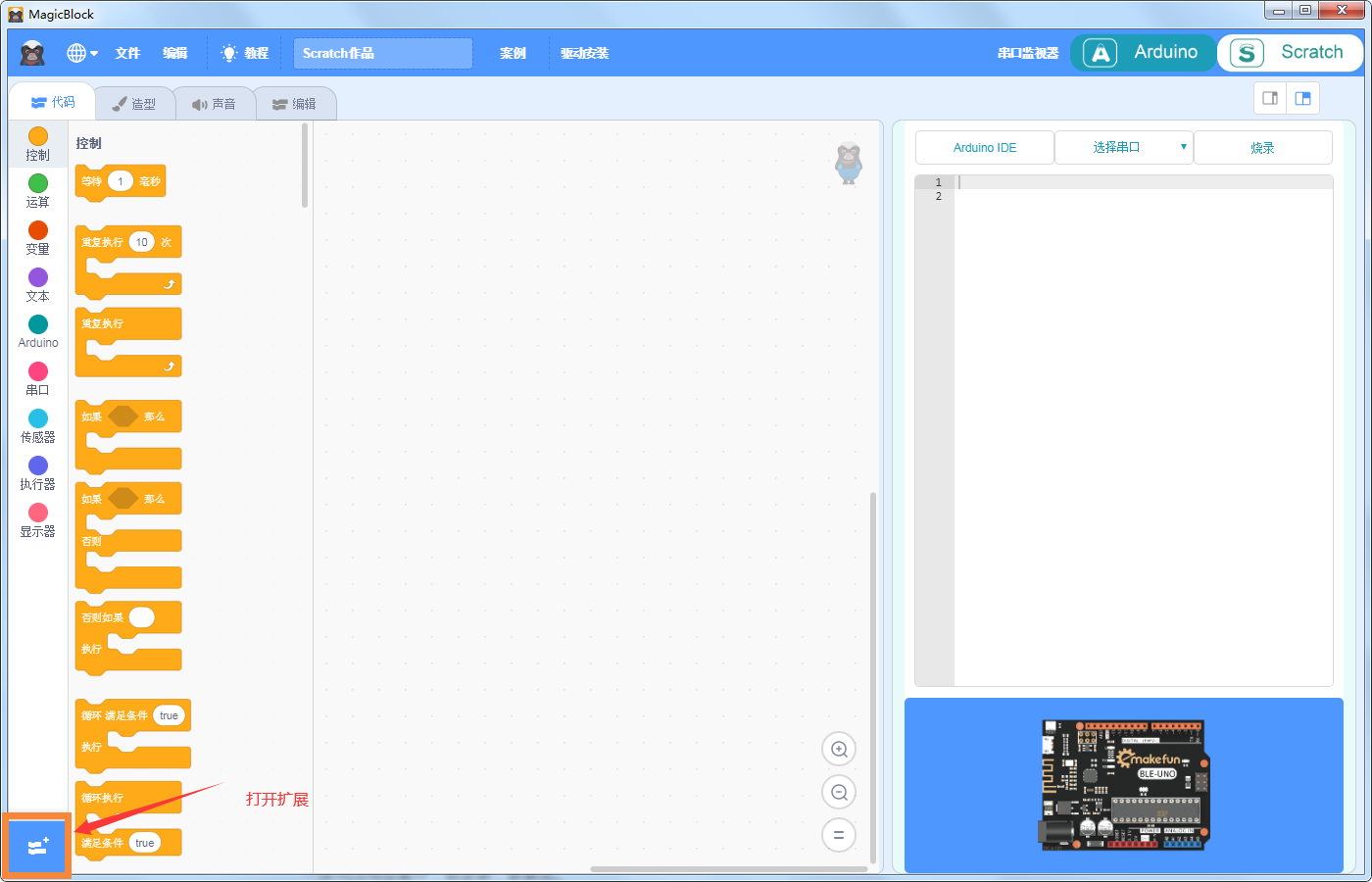
使用PantherTank扩展
首先在MagicBlock界面点击右上角的Arduino进入Arduino模式
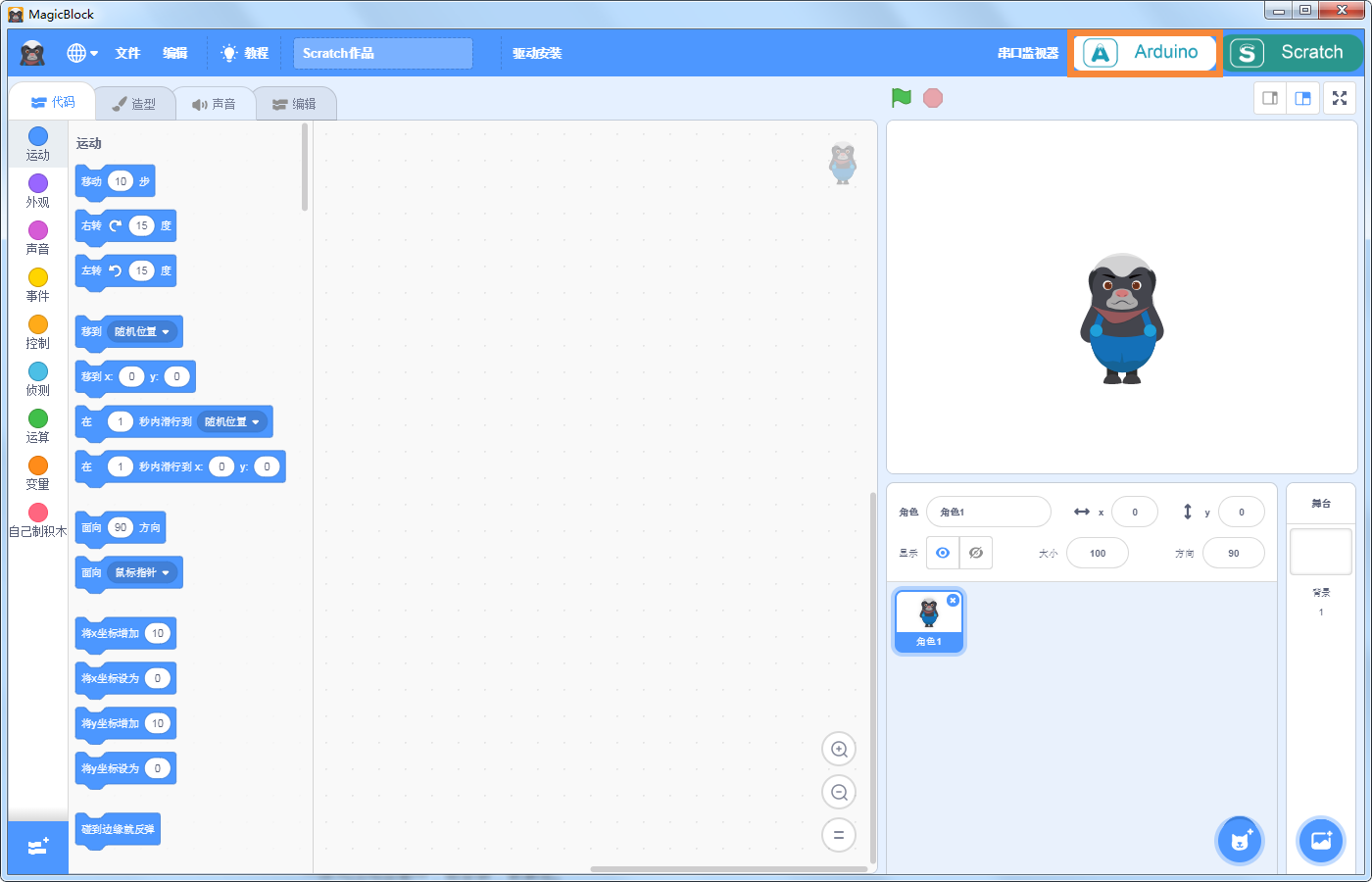
然后点击右下角选择扩展,再点击PantherTank扩展
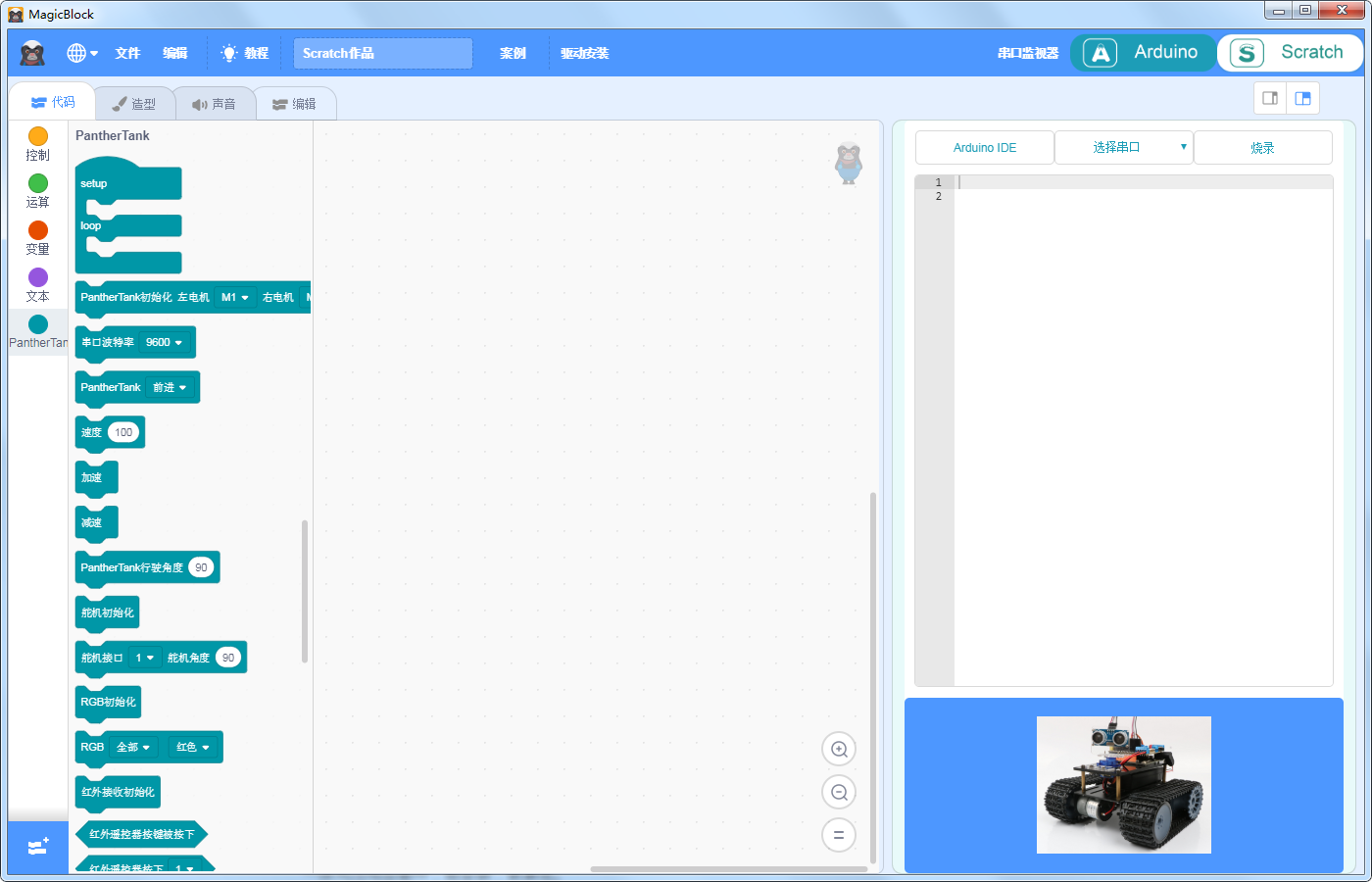
如何使用PantherTank图形块
选好PantherTank的扩展后就可以在左侧看到所有的PantherTank图形块了,我们就用这些图形块来为PantherTank编程
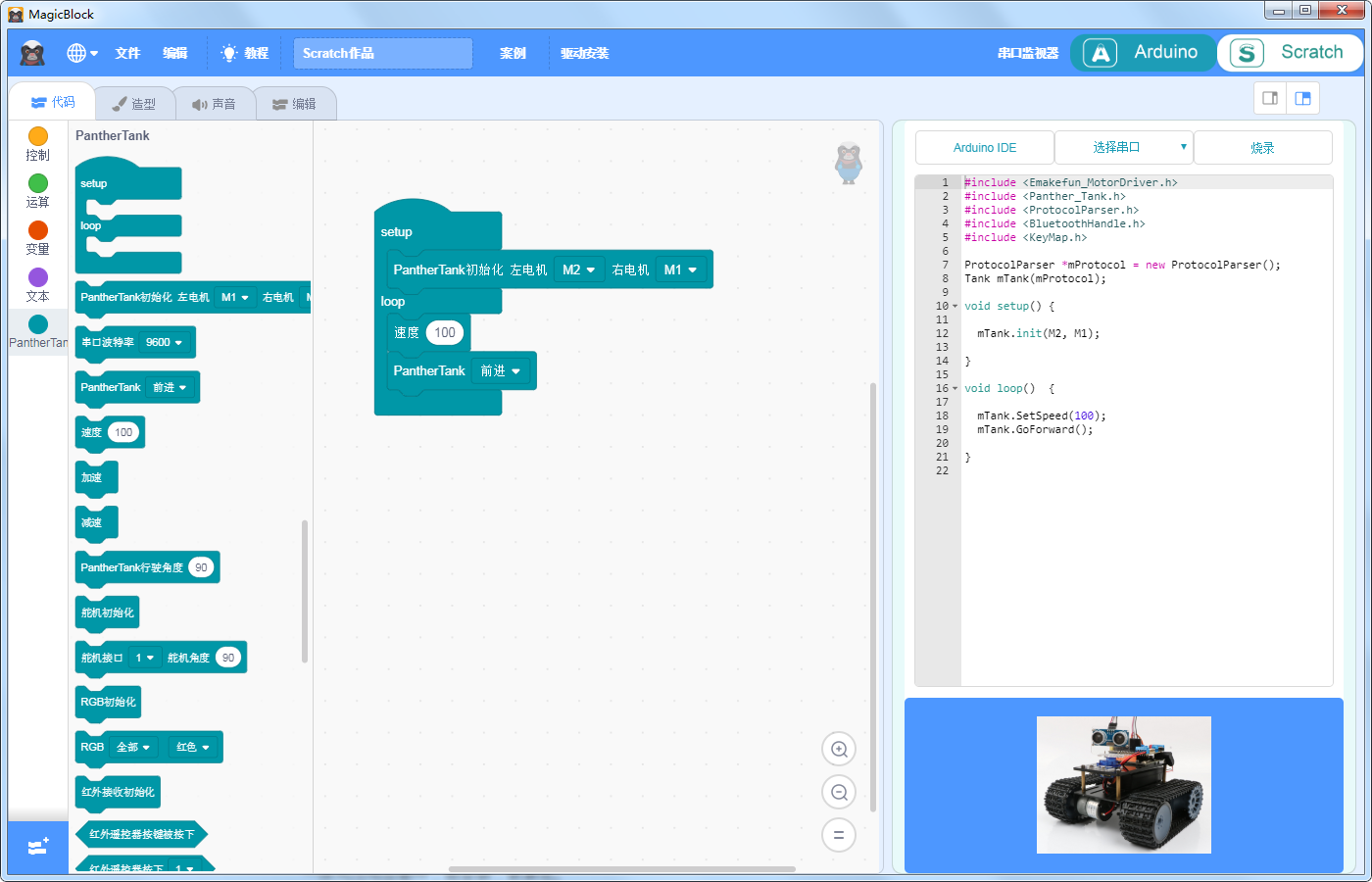
为PantherTank上传第一个程序:前进!PantherTank!
我们编写一个让PantherTank前进的程序,首先我们需要把主程序图形块“setup/loop”拖拽到代码区,“setup/loop”图形块是任何程序的必须的也是第一个要用到的图形块“setup”里面放PantherTank初始化图形块如RGB初始化等,“loop”里面放PantherTank的动作或功能程序图形块如前进,后退等。然后我们把PantherTank初始化图形块拖拽到setup中,这个图形块主要初始化PantherTank的电机并引入一些头文件,由于电机有4个接口,所以我们可以随意选择左右两个电机的接口,需要注意的是图形块里选择的电机接口必须要和实际接线一致,最后,我们拖拽出PantherTank的速度和动作图形块分别设置PantherTank的速度为50并让它前进,好了,PantherTank前进的程序就写好了.
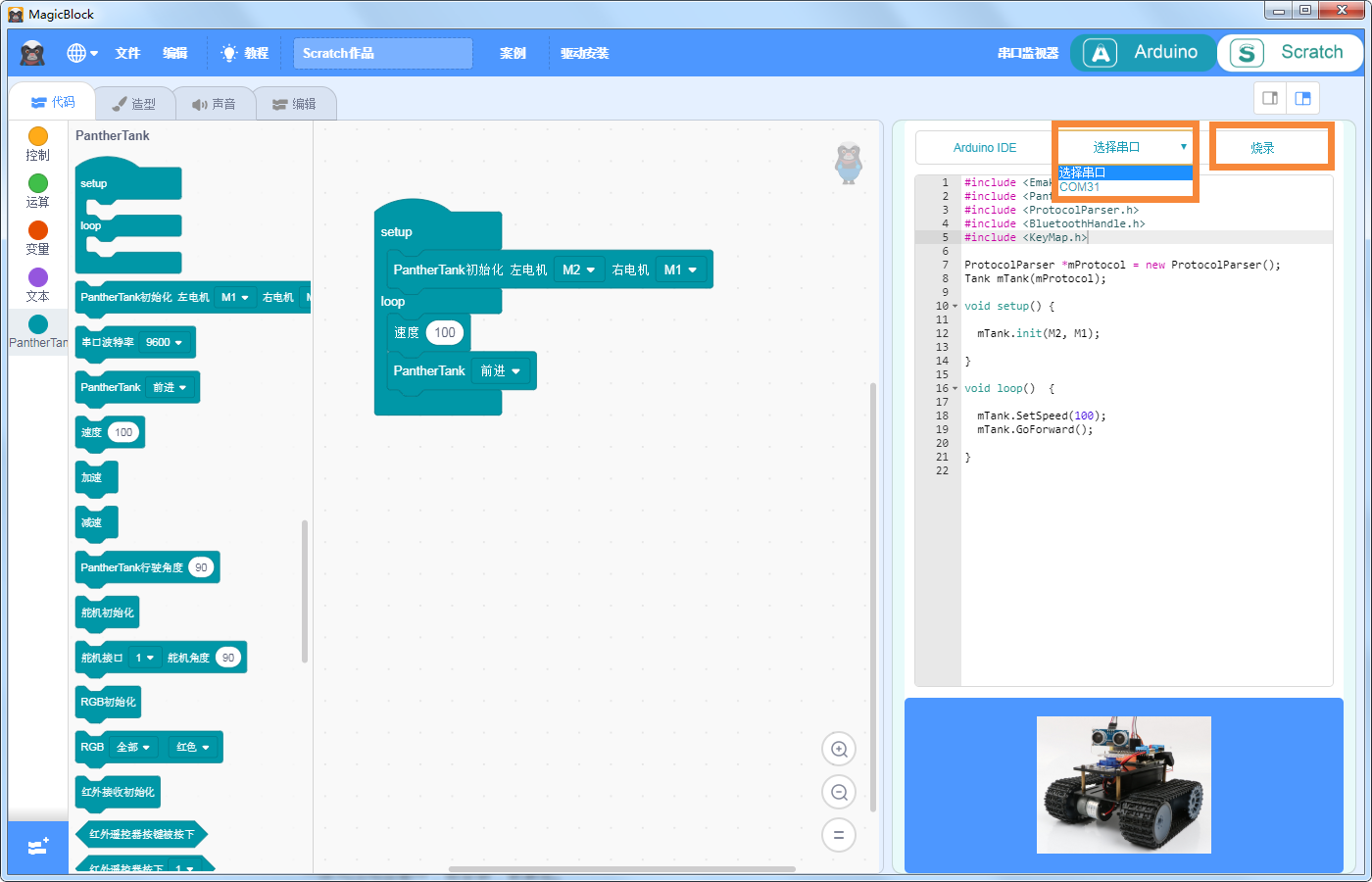
现在我们把程序上传到PantherTank上,让它跑起来,首先用usb线将PantherTank和电脑连接,点击“选择串口”选择PantherTank的串口,然后点击“烧录”,等待程序烧录进PantherTank中,拔掉usb线,打开电源就能看到PantherTank向前跑起来了
PantherTank各模块功能与MagicBlock示例程序
电机
电机介绍
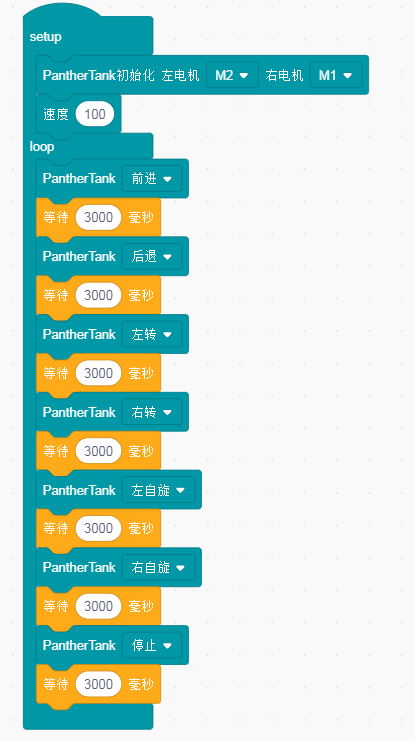
PantherTank有4个直流电机接口,分别是直流电机接口M1,直流电机接口M2,以及直流电机接口M3,直流电机接口M4,可通过端子直接将直流电机连接到驱动器上,PantherTank使用到了M2和M1两个电机,我们连接M2和M1就可以了
示例程序
RGB
RGB介绍
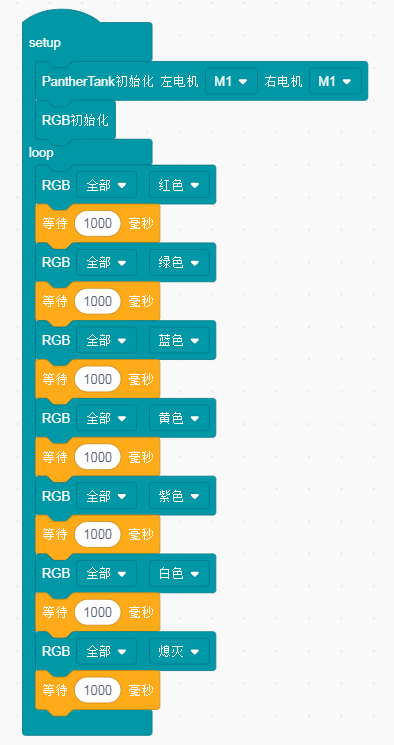
WS2812 RGB LED灯是三通道带驱动控制,其内部包含了智能数字接口数据锁存信号整形放大驱动电路,还包含有高精度的内部振荡器和15V高压可编程定电流输出驱动器。同时,为了降低电源纹波, 3个通道有一定的延时导通功能,这样在帧刷新时,可降低电路纹波安装更加简便。WS2812 RGB LED灯与传统灯不同,灯内部集成了驱动控制专用芯片,只需一条信号线即可控制一颗灯珠或多个模组。
示例程序
蜂鸣器
蜂鸣器介绍
PantherTank上面有一个无源蜂鸣器,可以通过编写程序控制蜂鸣器播放提示音或者播放音乐。
示例程序

舵机
舵机介绍
PantherTank可以驱动8路舵机,驱动板上的舵机引脚位置(红外接收头上方排针),设地线引脚(G),电源引脚(V)和信号引脚(S),三个引脚分别与舵机的相应引脚,也可以通过I2C通讯控制舵机,PantherTank只用到了1号接口的舵机,所以我们直接1号舵机就可以了。
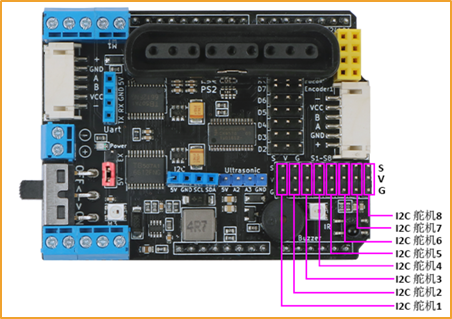
示例程序

超声波
超声波介绍
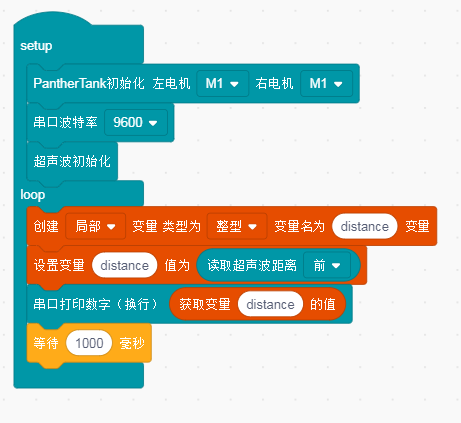
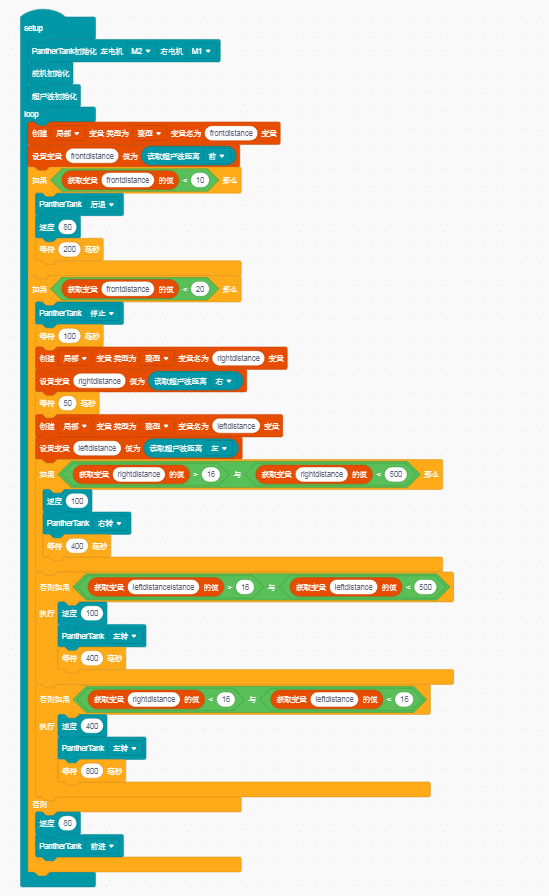
PantherTank上留有四线超声波模块接口,四个引脚分别是电源引脚(vcc),超声波信号发射引脚(A2),超声波信号接收引脚(A3),地线(GND), 四个引脚分别和超声波模块的相应引脚连接,我们可以结合PantherTank的超声波和舵机为PantherTank编写一个超声波避障程序。
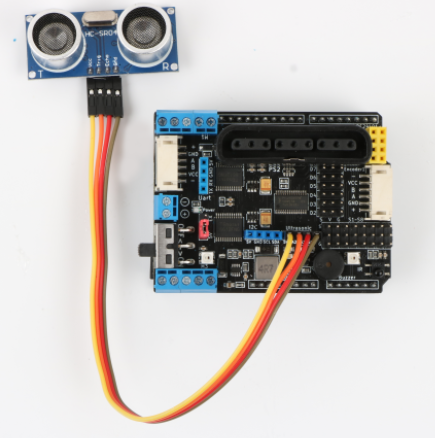
示例程序
超声波测试程序
超声波避障程序
红外遥控
红外遥控介绍
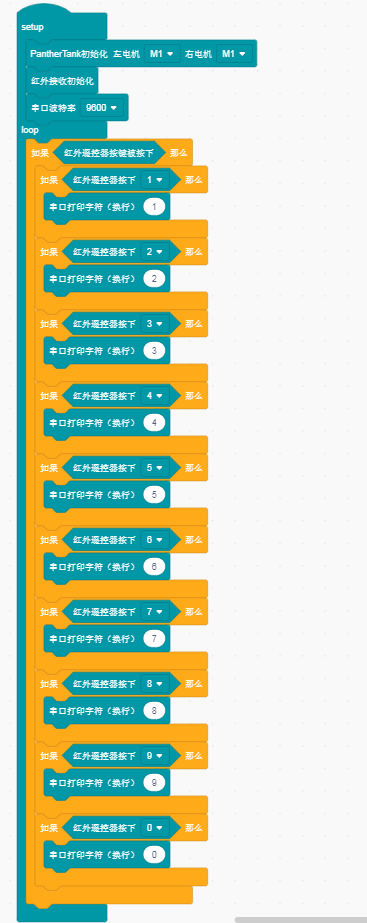
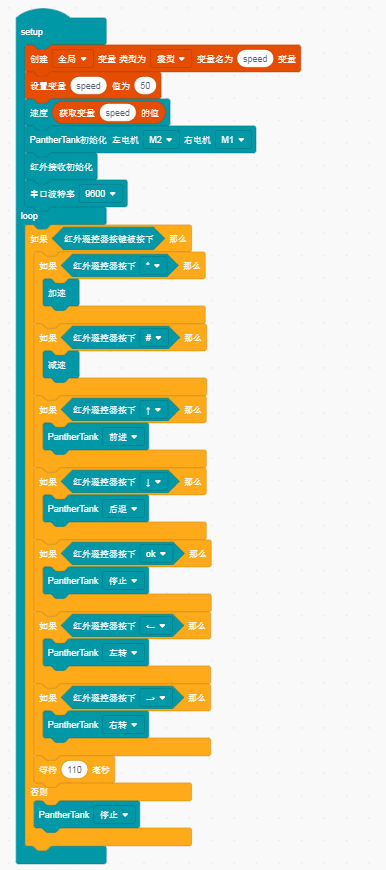
PantherTank上有一个红外遥控接收探头,使用时只需将扩展板插到Arduino上,有红外编码信号发射时,经红外接头处理后,输出为检波整形后的方波信号,并直接提供给单片机,执行相应的操作来达到控制电机的目的。

示例程序
红外遥控器测试程序
红外遥控操控程序
PS2
PS2介绍
PantherTank上有一个PS2端口,可将PS2红外接收头直接插到PS2端口,PS2手柄由手柄和接收器两个部分组成,手柄需要两节7号1.5V供电,接收器的电源和arduino使用同一电源,电源范围为3~5V,不能接反,不能超电压,过压和反接,都会使接收器烧坏。手柄上有个电源开关,ON开/OFF关,将手柄开关打到ON上,在未搜索到接收器的状况下,手柄上的灯会不停的闪,在一定时间内,还未搜索到接收器,手柄将进入待机模式,手柄上的灯将灭掉,这时,按下“START”键,唤醒手柄。

示例程序
PS2测试程序
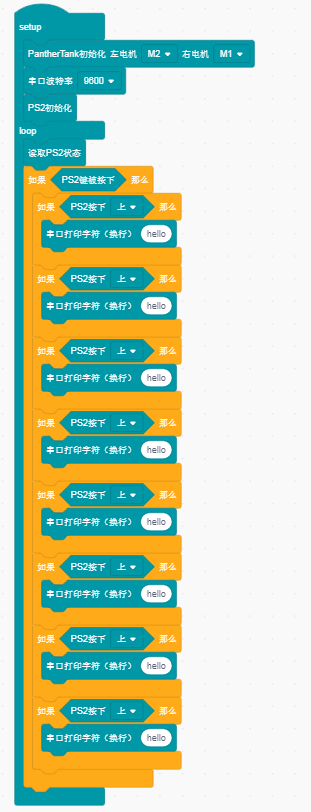
PS2操控程序

蓝牙
蓝牙介绍
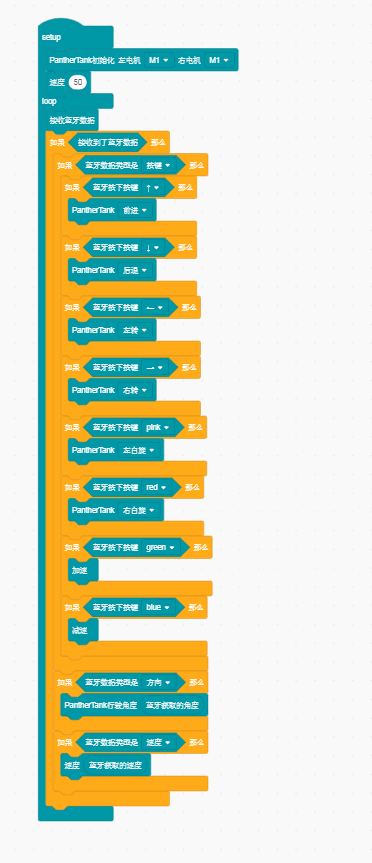
PantherTank主板上搭载了蓝牙,用手机的蓝牙连接,首先我们先下载emakefun 手机APP,打开APP后,选择一辆PantherTank进行蓝牙连接,我们需要编写一个蓝牙操控程序后,就可以进入APP蓝牙操控界面控制PantherTank。
示例程序
Nrf24L01
Nrf24L01介绍
nRF24L01+模块是Nordic公司基于nRF24L01芯片开发成的2.4G无线通讯模块。采用 FSK 调制,内部集成Nordic自己的 Enhanced Short Burst 协议。可以实现点对点或是 1 对 6 的无线通信。无线通信速度最高可达2M(bps),NRF24L01有收发模式,配置模式,空闲模式,关机模式四个工作模式,PantherTank上有一个Nrf24L01接口。
示例程序
