PH2.0小手柄
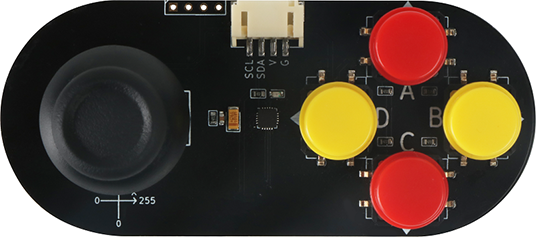
实物图
概述
PH2.0小手柄包含两个电位器(X轴和Y轴)操纵/杆和五个按键(A、B、C、D、摇杆按键Z)。操纵杆根据两个触点控制运动,其中一个触点向左和向右,另一个向上和向下。操纵杆通过AD传感器读取不同的电压值,从而识别特定的位置。X轴和Y轴的模拟值都是从0到255,分别表示从左到右的位置和从上到下的位置。当没有操作时,X和Y轴方向的模拟值都为128。A、B、C、D和摇杆按键Z五个按键都有5种状态(按下、释放、单击、双击、长按)。通过I2C连接Arduino主板发送数据。
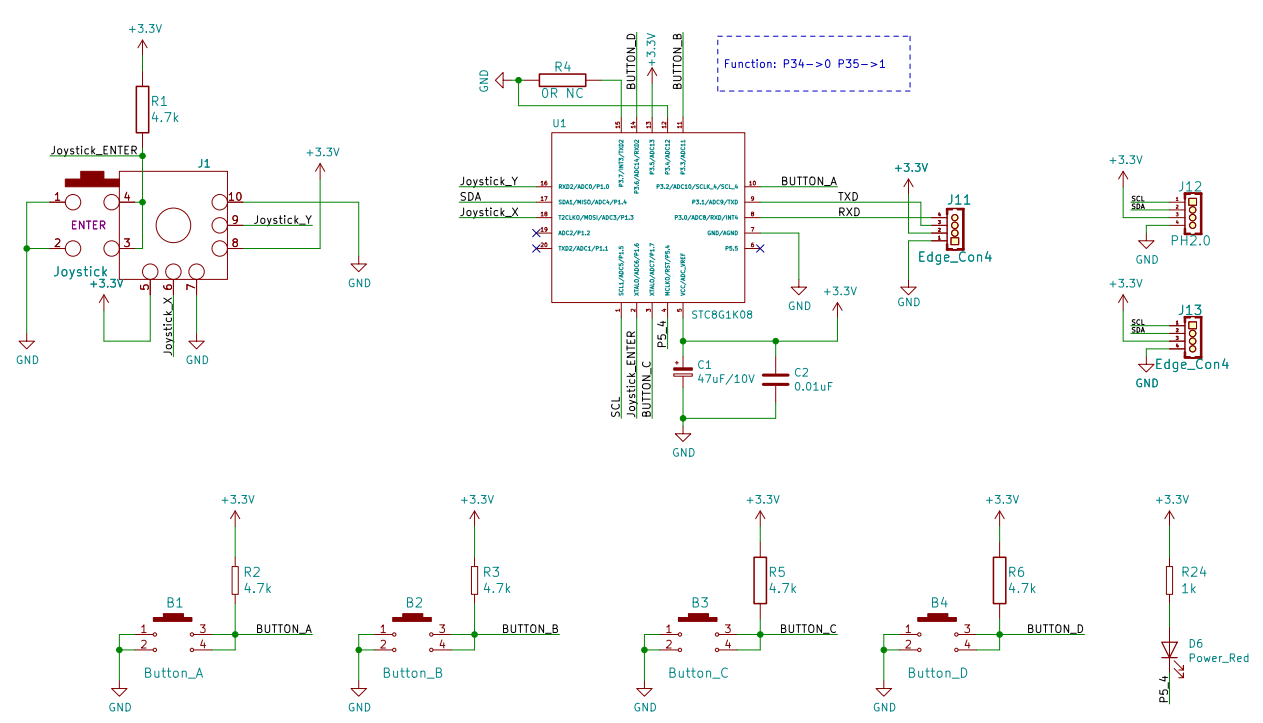
原理图
模块参数
| 引脚名称 | 描述 |
|---|---|
| G | GND |
| V | VCC |
| SCL | I2C通信时钟引脚 |
| SDA | I2C通信数据引脚 |
- 供电电压:3V3/5V
- 通信方式:IIC,地址0x5A
- 连接方式:PH2.0 4PIN防反接线
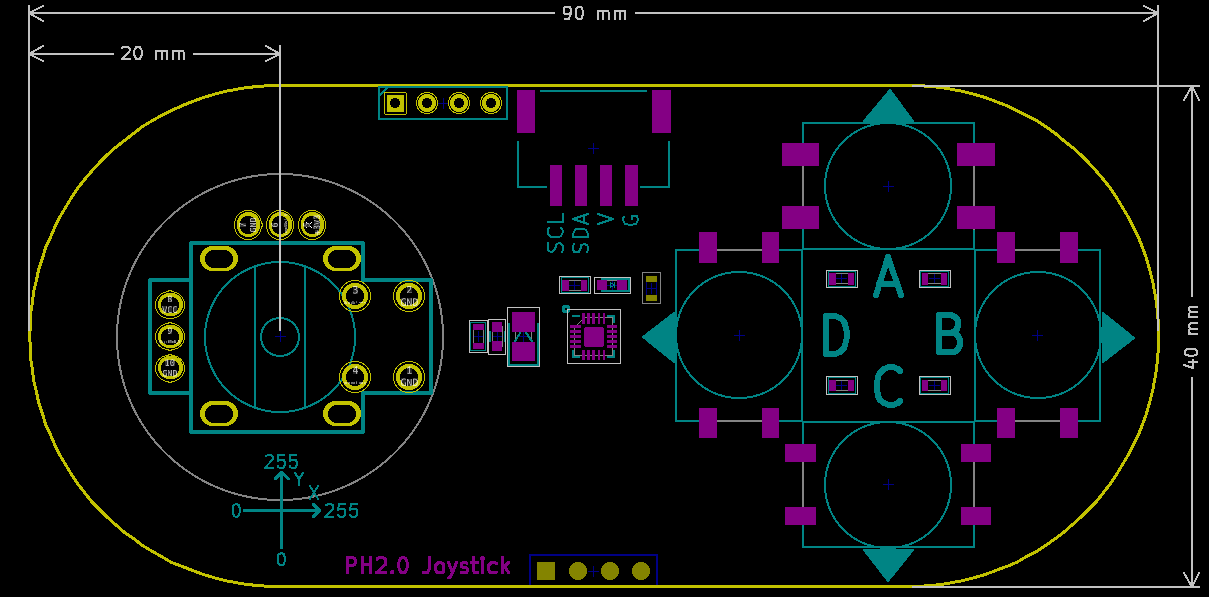
- 外形尺寸:90*40mm
机械尺寸图
Arduino示例程序
#include "JoystickHandle.h"
JoystickHandle myJoystickHandle(JOYSTICK_I2C_ADDR);
void setup(){
Serial.begin(9600);
}
void loop(){
if (myJoystickHandle.Get_Button_Status(BUTOON_UP)==PRESS_DOWN) { // 判断按键A是否按下
Serial.println("Button_A Pressed");
}
if (myJoystickHandle.Get_Button_Status(BUTOON_RIGHT)==PRESS_DOWN) { // 判断按键B是否按下
Serial.println("Button_B Pressed");
}
if (myJoystickHandle.Get_Button_Status(BUTOON_DOWN)==PRESS_DOWN) { // 判断按键C是否按下
Serial.println("Button_C Pressed");
}
if (myJoystickHandle.Get_Button_Status(BUTOON_LEFT)==PRESS_DOWN) { // 判断按键D是否按下
Serial.println("Button_D Pressed");
}
if (myJoystickHandle.Get_Button_Status(JOYSTICK_BUTTON)==PRESS_DOWN) { // 判断遥感按键是否按下
Serial.println("Joystick_Button Pressed");
}
Serial.print("Value_X:");
Serial.println(myJoystickHandle.AnalogRead_X()); // 读取摇杆X轴的模拟值打印出来
Serial.print("Value_Y:");
Serial.println(myJoystickHandle.AnalogRead_Y());// 读取摇杆Y轴的模拟值打印出来
delay(500);
}