Microbit 编程
Microbit 支持三种编程语言:makecode,micropython,JavaScript。编程方式分为:在线编程、离线编程。其中在线编程中、 makecode为积木编程、与JavaScript源代码编程在同一页面,可以点击按钮选择其中一种编程;micropython源代码编程在另一个编程页面。
- 如果想要在线编程,可以把Microbit 主板通过usb接口的数据线与电脑进行连接,这时在我的电脑查看就会发现多了一个MICROBIT内存盘,说明Microbit 与电脑连接正常,双击打开这个内存盘,在电脑能够连接网络的情况下双击 MICROBIT.HTM ,在打开的网页的右上通过Language 选择大陆简体或其它语言。页面自动更新后点击让我们开始编程吧/Let‘s Code;页面更新后,下拉会发现有MakeCode编辑器和Python编辑器,点击相应编辑器的让我们开始编程吧/Let’s Code。这样就进入了编程页面。
makecode 积木编程
makecode 有离线编程软件,使用方法和在线编程方法相同。需要离线编程软件,可以在微软商店搜索 MakeCode for micro:bit,点击安装即可。
makecode 编程步骤
- 除了上面介绍的进入在线编程页面的方法以外,也可以直接在电脑浏览器内输入编程页面的网址
https://makecode.microbit.org/点击搜索或回车进入编程页面。 - 进入makecode 编程页面后,点击
新建项目/New Project。这样就进入了makecode 的代码编程界面,在界面左边的积木栏拖拉相应的积木放到右边的程序界面,通过不同的组合,一个程序就编写完成。 - makecode 有两种下载方式,一种是直接把程序文件下载到
Microbit主板;另一种是把程序文件下载到电脑相应位置,然后再把该文件复制粘贴到MICROBIT内存盘内。程序编写完成后,点击界面左下角的下载/Download,选择保存位置为MICROBIT内存盘。当主板的指示灯开始闪烁的时候,表示程序正在下载,闪烁结束表示下载完毕(然后出现错误,Microbit屏幕会显示相应的错误信息)。
makecode 编程添加积木
- makecode 编程如何添加扩展积木包呢?当我们需要其它积木包时,点击界面积木栏的
高级/Advanced,再点击扩展/Extensions。这样就进入了添加扩展包的界面,此界面有一些分享的扩展包,如何需要添加特定的扩展包,需要在搜索栏输入项目包的网址,比如:输入https://github.com/emakefun/pxt-magicbit.git,再点击搜索或回车,就会打开相应的积木包,点击积木包,那么这个积木包的内容就成功的添加到积木栏内。
makecode 编程下载注意事项
- 在进行程序下载时,需要注意程序文件的下载位置,如果采用直接下载方式,文件下载路径要选择MICROBIT内存盘(如果我的电脑显示的不是MICROBIT内存盘,而是MAIMAINTENANCE,说明主板固件损坏,可以重新烧录固件)
micropython 代码编程
Microbit 官方提供了micropython的在线编辑器,如果需要使用离线编辑器可以使用mu这款编辑器。
micropython 在线编辑器
- Microbit 使用micropython编写程序时,可以使用官方提供的在线编辑器,在浏览器网址搜索栏输入
https://python.microbit.org/点击搜索或回车,进入micropython编程页面。 - 当microbit通过usb数据线与电脑连接后,点击在线micropython编辑器的
Disconnect,选择相应的 Microbit 主板,点击 连接 ,这样 Microbit 主板就与在线编辑器连接在一起。程序编写完成后、点击Flash按键,程序就可以直接下载到 Microbit 主板,省去了选择下载文件路径的步骤。(打开时默认有一个例程程序,可以直接点击下载) - Microbit 在线编辑器,还提供了命令行控制模式,当按照上面步骤把 Microbit 与在线编辑器连接后,点击
Open Serial,再点击左边的Send CTRL-C for REPL,就进入了命令行编辑模式。在命令行模式、输入import microbit敲击回车、再输入microbit.display.show(1)敲击回车。此时 Microbit 屏幕就显示一个数字1。
mu 离线编辑器
什么是mu ?
mu 是一款简单的python集成开发环境,可以帮助用户编译一些控制器和处理器,该软件功能界面简单,打开软件以后可以选择四个模式编辑,支持 PYTHON 3、Pygame Zero、 BBC MICRO: BT、 ADAFRUIT CIRCUITPYTHON,选择一个模式就可以进入到编辑界面,可以直接在软件上编辑代码,也可以通过加载.PY或者是.hex文件到软件上调试,功能非常实用!并且软件提供了一个图形调试器工具。适合中小学生Python学习者。
Mu 下载安装
Mu下载安装方便,用户可以直接通过 Mu官网 下载适合自己电脑的Mu版本,具体安装过程如图所示 
如果需要了解详细的安装说明,可以登录 Mu安装 学习
Mu 的 BBC micro:bit 模式介绍
-
’‘模式“按钮可以选择相应的编辑模式,在为micro:bit主板编程时,应选择BBC microbit 。
-
”新建“按钮可以新建编程文件,用来为micro:bit编写python控制程序
-
”加载“按钮是用来加载电脑中已经保存好的 .py 文件。注意:在安装好Mu后,点击加载,记下加载的文件路径,这个路径就是microbit库文件在电脑的存放路径,在往后的学习中,会多次micro:bit添加库,需要用到该路径把库 放到电脑的这个固定位置
-
”保存“按钮是用来保存修改过或新建的文件
-
“刷入”按钮将Python代码下载到连接的micro:bit上(microbit主板的指示灯“闪烁”表示正在下载python程序到micro:bit上)。当micro:bit主板指示灯闪烁时,主板也在删除之前下载的程序。如果下载的代码包含一个错误,micro:bit屏幕会滚动显示错误信息。闪烁的过程大约需要10秒,如下所示:
-
“文件”按钮可以方便地访问、放置、获取和删除设备上的文件。如下图所示,单击“文件”会在文本编辑器和Mu的页脚之间打开两个窗格。左边的窗格列出micro:bit上的所有文件,右边的窗格列出mu_code你电脑上的文件。在每个文件之间拖动文件以复制它们。若要删除micro:bit上的文件,请右击它并选择“Delete”。
 注意:如果点击文件,提示错误,可以重新插拔microbit主板以及重新打开Mu,或者 在代码区输入”import microbit“,然后点击刷入,再次打开文件。
注意:如果点击文件,提示错误,可以重新插拔microbit主板以及重新打开Mu,或者 在代码区输入”import microbit“,然后点击刷入,再次打开文件。 -
“REPL”按钮在文本编辑器和Mu的页脚之间创建一个新窗格,连接到MicroPythonREPL关于micro:bit装置。“REPL”这个词是一个缩略语,代表“Read,Value,print,循环”,它简洁地描述了面板为您做了什么。它读取您键入的Python的交互式行,计算这些代码的含义,输出它为您提供的任何结果,然后循环返回以等待您的下一个Python指令。
-
“绘图仪”按钮打开了Mu的绘图仪。如果您的micro:bit是通过串行连接输出数字元组,绘图仪将显示它们为一个图形。这对于可视化您可能通过微:位测量的任何数据是非常有用的。
 有关更多信息,请阅读 穆氏绘图仪教程.
有关更多信息,请阅读 穆氏绘图仪教程. -
”放大“和”缩小“按钮的作用是用来放大和缩小代码的大小,可以根据需要来调整代码字体的大小
-
”主题“按钮是用来调整Mu的编程主题风格,可以点击切换不同的背景主题
-
"检查"按钮是用来检测代码的错误的,在编程程序的过程中,可以通过该按钮检查常规错误,也可以通过刷入后micro:bit屏幕有无提示以及提示信息来更详细的检查代码
-
”Tidy“按钮是用来调整整个程序的美观性的
-
”帮助“按钮可以进入Mu官方网站,寻找更详细的软件资料
-
”退出“按钮是用来退出Mu软件
mu 使用步骤
- 点击”模式“按钮,选择BBC microbit 模式(如果打开软件的时候已经选择BBC microbit模式,此步骤可以忽略)
- 点击"新建"按钮,新建编写文件,编写相应的micro:bit程序
- 点击“保存”按钮,把编写的micro:bit程序保存到相应位置(如果仅仅是临时测试程序可以不用保存)
- 点击”检查“按钮,检查程序有无常规错误。当程序下载完成,如果程序是错误的,micro:bit屏幕也会出现相应错误信息。
- 点击”刷入“按钮,把编写好的micro:bit程序下载到micro:bit主板,micro:bit主板指示灯闪烁表示程序正在下载,当闪烁结束的时候,如果micro:bit屏幕没有错误信息,表示程序下载成功。
mu 添加程序库
- 我的程序文件呢?人们有时很容易丢失他们的代码,所以Mu的默认文件位置始终为mu_code,mu_code的路径怎么找呢?当安装好Mu,点击”加载“按钮,加载出来的就是mu_code的文件路径,记住此路径,在以后的学习中需要添加库,就放到电脑的该路径的位置(每个电脑的路径会稍有不同)。
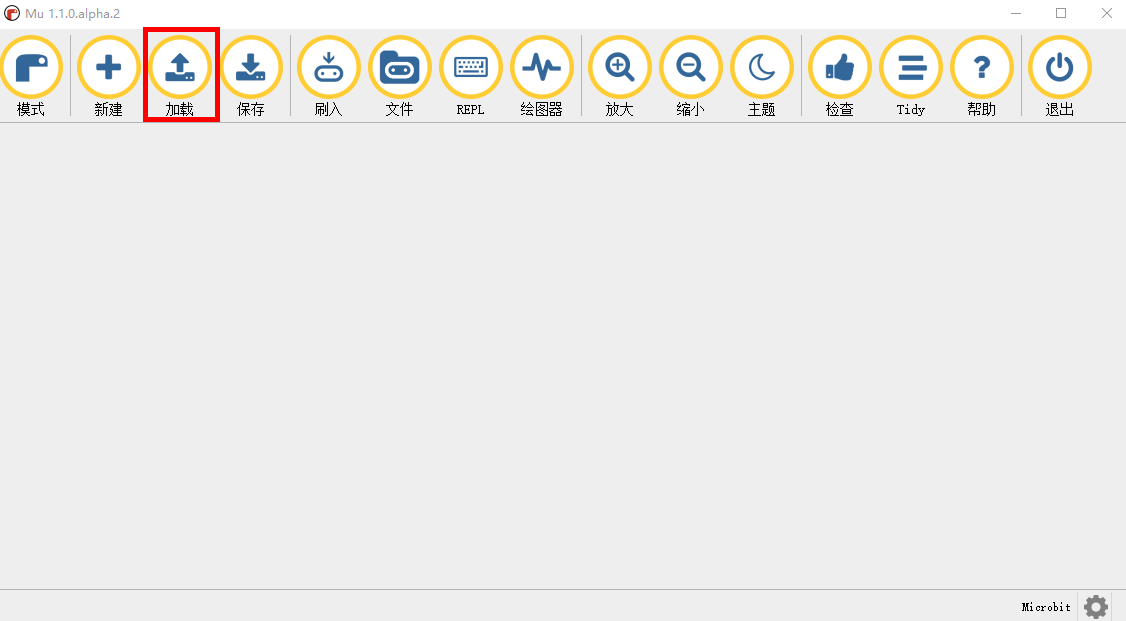 点击”加载“按钮
点击”加载“按钮
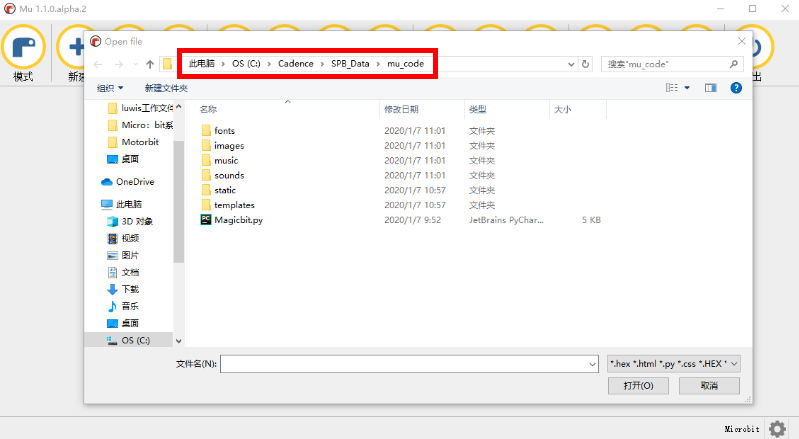 记下mu_code路径
记下mu_code路径
-
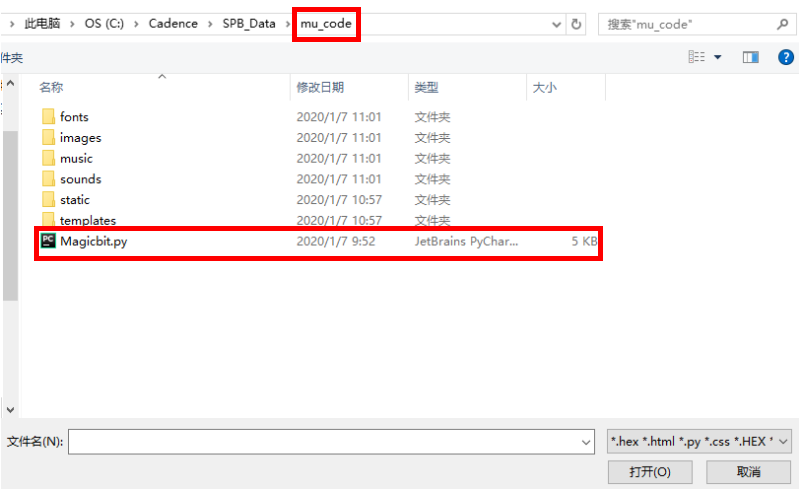
把Magic:bit库文件复制粘贴到mu_code文件内,结果如图
-
打开Mu软件,点击”文件“按钮,通过拖拽,把电脑中的文件拖拽到BBC micro:bit中,当micro:bit主板的指示灯闪烁结束的时候,表示Magic:bit库文件已经添加到micro:bit主板,可以通过from Magicbit import * 来使用Magicbit库了,需要注意的是,在调用库的时候要确保Magicbit库在microbit主板内,因为microbit库文件不是一次下载就永远存在的。
mu 设置默认固件
mu下载程序的同时会调用 mu 的相关固件,那么如何设置 mu 的默认固件呢?以 motorbit 固件为例,分为以下几个步骤:
- 把 motorbit.hex 拷贝到 mu 的工作目录,C:\Users\你的用户名\mu_code
- 编辑 mu 的配置文件 C:\Users\你的用户名\AppData\Local\python\mu\setting.json ,在这个文件中插入以下内容
“microbit_runtime_hex“: "motorbit.hex"。注意:前一行的最后要加一个逗号。 - 编辑完后完整文件内容如下:
{
"paths": [],
"theme": "day",
"workspace": "C:\\Users\\Administrator\\mu_code",
"microbit_runtime_hex": "motorbit.hex"
}
需要注意的是,”workspace“ 表示的是固件的路径,在编辑的时候需要特别注意,”microbit_runtime_hex“ 表示的是固件的名称。 3. 保存文件,重新打开mu,新建项目输入 ”import motorbit“,刷入后没有提示错误,说明固件设置成功。 motorbit扩展API
mu 命令行模式
当Microbit 通过usb数据线与电脑连接一起时,点击 REPL按钮 ,mu 进入命令行模式。在命令行模式下,每次输入代码的同时,代码已经下载到 Microbit 主板中,使用mu的 REPL 就像开发者在使用 microPython 与 Microbit 进行对话一样,比如在 >>> 后输入print(2), 回车后就会打印出 2 ; 输入 1 + 2,回车后就会打印出 3。在常规Python脚本中可以做的任何事情,都可以在REPL中完成。这是一种有趣的方法,可以有趣地探索MicroPython在 Microbit 上的功能。去吧,玩玩吧!(提示:microPython中内置了大量的复活节彩蛋:bit…。你能找到他们吗?)
python 基础语法
Python 简介
Python 是一个高层次的结合了解释性、编译性、互动性和面向对象的脚本语言。Python 的设计具有很强的可读性,相比其他语言经常使用英文关键字,其他语言的一些标点符号,它具有比其他语言更有特色语法结构。
解释性:这意味着Python的开发过程中没有了编译这个环节。 互动性:这意味着您可以在一个 Python 提示符
>>>后直接执行代码。```shell
print ("Hello World!") #在shell中打印"Hello World!" Hello World! ``` 面向对象:这意味着Python支持面向对象的风格或代码封装在对象的编程技术。
Python注释
正如前面我们看到的,Python的注释可以使用# 要注释的内容来进行。使用这种方式也可以进行多行注释,例如:
# -*- coding: UTF-8 -*-
#要注释的第一行
#要注释的第二行
#……
当然我们也可以采用'''这里是注释内容'''或者"""这里是注释内容"""的方式来进行多行注释。
注意,使用中文进行注释时,一定要在第一行加入# -*- coding: UTF-8 -*-。
# -*- coding: UTF-8 -*-
'''
要注释的第一行
要注释的第二行
……
'''
#或者如下:
"""
要注释的第一行
要注释的第二行
……
"""
基本数据类型
Python的数据类型主要有以下几种:
数字 字符串 列表 元组 字典
1.数字
Python支持四种不同的数字类型:int,long,float,complex。其中int为整型,long为长整型,float为浮点型,complex为复数。
注意,在Python 3. x版本中int,long合并为int!
2.字符串
字符串是由数字、字母、下划线组成的一串字符。Python的字串列表有2种取值顺序: - 从左到右索引默认0开始的,最大范围是字符串长度少1。 - 从右到左索引默认-1开始的,最大范围是字符串开头。
如果你要实现从字符串中获取一段子字符串的话,可以使用[头下标:尾下标] 来截取相应的字符串,其中下标是从 0 开始算起,可以是正数或负数,下标可以为空表示取到头或尾。
>>> str='hello'
>>> str[0:2]
'he' #左边第一位为0,故截取0到1两个字符并打印出来
>>> str[-4:-1]
'ell' #右边第一位为-1,故截取-4到-2三个字符并打印出来。
另外Python的字符串还可以进行相加,相乘等操作。
>>> str='hello'
>>> s='world'
>>> print(str+s)
helloworld
>>> str*2
'hellohello'
3.列表
列表用 [ ]标识,是 Python 最通用的复合数据类型。列表中值的切割也可以用到变量 [头下标:尾下标] ,就可以截取相应的列表,从左到右索引默认 0 开始,从右到左索引默认 -1 开始,下标可以为空表示取到头或尾。
>>> list1=['h','e','l','l','o']
>>> list2=[',','world','!']
>>> print(list1) #打印列表list1中全部内容
['h', 'e', 'l', 'l', 'o']
>>> print(list1[1:4]) #打印列表中从1到3的内容
['e', 'l', 'l']
>>> print(list1[1:]) #打印列表中从1开始的所有内容
['e', 'l', 'l', 'o']
>>> print(list1+list2) #将列表list1和list2的内容相加并打印出来
['h', 'e', 'l', 'l', 'o', ',', 'world', '!']
4.元组
元组是另一个数据类型,类似于列表。元组用()标识。内部元素用逗号隔开。但是元组不能二次赋值,相当于只读列表。
>>> tuple=('h','e','l','l','o')
5.字典
字典由键值对组成,以{}标识。字典与列表的区别就是,列表是有序的对象集合,字典是无序的对象集合。
>>> dict={'name': 'python','code':'hello', 'method': 'print'}
>>> print(dict.keys())
dict_keys(['name', 'code', 'method']) #打印出所有的键
>>> print(dict.values())
dict_values(['python', 'hello', 'print']) #打印出所有的值
条件语句
Python的条件语句主要有两种类型:
# -*- coding: UTF-8 -*-
if (条件1):
语句块1 #条件1满足时执行执行语句块1,否则执行语句块2
else:
语句块2
# -*- coding: UTF-8 -*-
if (条件1):
语句块1 #条件1满足时执行执行语句块1
elif:(条件2)
语句块2 #条件2满足时执行执行语句块2
elif:(条3)
语句块3 #条件3满足时执行执行语句块3
elif:(条件4)
语句块4 #条件4满足时执行执行语句块4
else:
语句块5 #以上条件均不满足时执行语句块5
循环语句
Python中的循环语句主要有两种:while和for。
while循环
# -*- coding: UTF-8 -*-
i=0
while i<10:
i+=1
print ('i=',i)
以上程序就是使用while循环依次打印出i的值,由于每一次循环i的值都加1,所以该程序的运行结果为:
i= 1
i= 2
i= 3
i= 4
i= 5
i= 6
i= 7
i= 8
i= 9
i= 10
for循环
当然,我们也可以使用for循环实现以上结果。
# -*- coding: UTF-8 -*-
for i in range(1,11):
print ("i=",i)
函数
Python中定义函数的方法需要遵循以下规则:
- 函数代码块以
def关键词开头,后接函数标识符名称和圆括号()。 - 任何传入参数和自变量必须放在圆括号中间。圆括号之间可以用于定义参数。
- 函数内容以冒号
:起始,并且缩进。 return [表达式]结束函数,选择性地返回一个值给调用方。不带表达式的return相当于返回None。
例如:
# -*- coding: UTF-8 -*-
def func():
i=2
j=3
return i+j #返回i+j的值,即返回5给调用方。
print(func()) #print调用func函数,并打印出func的返回值。
以上程序的运行结果为:
5
micropython 常用API
display.scroll("Hello, microbit_python!")
在micro:bit点阵上滚动显示Hello, microbit_python!,其中Hello, microbit_python!可以替换成任意字符。
display.show(Image.HAPPY)
在micro:bit点阵上显示笑脸的图形,BBC Microbit_Python还有很多内置的图片可以显示在显示屏上,图片列表就是一个内置图像的列表。
display.get_pixel(x, y)
得到像素的亮度(x,y),亮度可以是0(熄灭)到9(像素处于最大亮度)。
display.set_pixel(x, y, val)
设置像素(x,y)的亮度为val(在0到9之间)
display.clear()
清除显示
display.scroll(string, delay=400)
在显示屏上滚动一个字符串,每个字符之间间隔为400毫秒。
image = Image('90009:09090:00900:09090:90009:')
自定义microbit显示图像,数值表示亮度。0表示熄灭。9最亮的水平,冒号“:”表示一条LED线的末端。
image = Image(width, height)
创建一个空图像并给出尺寸
image = Image(width, height, buffer)
用指定的宽度和高度初始化一个图像,缓冲是长度和宽度的数组
image.width()
返回图像的宽度(通常是5)
image.height()
返回图像的高度(通常是5)
image.set_pixel(x, y, value)
将像素设置为指定位置,value像素值在0到9之间
image.get_pixel(x, y)
获取指定位置的像素,像素值在0到9之间
image.shift_left(n)
通过将图片向左移动n次,返回一个新图像
image.shift_right(n)
通过将图片向右移动n次,返回一个新图像
image.shift_up(n)
通过将图片向上移动n次,返回一个新图像
image.shift_down(n)
通过将图片向下移动n次,返回一个新图像
repr(image)
获得图像的字符串表示
accelerometer.get_x()
测量X轴的重力值,以重力g为单位
accelerometer.get_y()
测量Y轴的重力值,以重力g为单位
accelerometer.get_z()
测量Z轴的重力值,以重力g为单位
accelerometer.get_values()
获取X、Y和Z轴的重力数值(按此顺序列出)
accelerometer.current_gesture()
获取当前的手势值,BBC Microbit_Python能够识别下列手势:上、下、左、右、面朝下、面朝下,自由落体,3 g,6 g,8 g,摇。手势值的在程序中的表示依次是up, down, left, right, face up, face down,freefall, 3g, 6g, 8g, shake。
accelerometer.is_gesture(name)
返回真或假,以指示当前活动是否为指定的手势。
accelerometer.was_gesture(name)
返回真或假,以指示最后一次活动是否为指定的手势。
accelerometer.get_gestures()
返回手势历史的元组,最近的一次活动是最后一次。
compass.calibrate()
校准指南针
compass.heading()
返回一个数字,表示“北方”的程度偏移量。
compass.get_field_strength()
返回一个关于磁场强度的数值指示
compass.is_calibrated()
若电子罗盘被成功校准,返回 True ,否则返回 False 。
compass.clear_calibration()
取消校准,初始化至未校准状态。
microbit.compass.get_x()
根据磁力的方向,将 x 轴上的磁力读取为正整数或负整数
microbit.compass.get_y()
根据磁力的方向,将 y 轴上的磁力读取为正整数或负整数。
microbit.compass.get_z()
根据磁力的方向,将 z 轴上的磁力读取为正整数或负整数
button_a.is_pressed()
表示按钮正被按下,返回真或假
button_a.was_pressed()
表示按钮是否被按下,返回真或假,再开始或最后调用这个函数。
button_a.get_presses()
这个函数返回之前A按下的次数。调用这个函数后,计数会清零,重新开始计数。
while True:
无限循环
for num in range(1,10):
如果num的值在1~10之间,就循环
if ...: #如果...事件是正确的或者发生了,执行这条命令
elif ...: #否则如果...事件是正确的或者发生了,执行这条命令
else: #否则,执行这条命令
pin.write_digital(value)
向引脚写入数字值,可以是0,1,False,True
pin.read_digital()
读取引脚的数字值,返回0或1
pin.write_analog(value)
向引脚写入模拟值,可以是1-1023范围内的值
pin.read_analog()
读取引脚的模拟值,返回1-1023范围内的值
pin.set_analog_period(int)
以毫秒为单位设置PWM输出的周期
pin.set_analog_period_microseconds(int)
将引脚的PWM输出的周期设置为微秒
pin.is_touched()
如果引脚被触摸,返回一个布尔值
music.play(music.NYAN)
播放一个旋律 内置的旋律完整的列表:
DADADADUM - 贝多芬-C小调第五交响曲开场。 ENTERTAINER - Scott Joplin的Ragtime经典“The Entertainer”的开场片段。 PRELUDE - 巴赫的48首C大调前奏曲和赋格曲的前奏曲开场。 ODE - 贝多芬D小调第九交响曲《欢乐颂》主题 NYAN- Nyan Cat主题 RINGTONE - 听起来像是手机铃声。用于指示传入消息。 BLUES - Boogie-woogie 12小节蓝调低音群持续复奏 BIRTHDAY - “祝你生日快乐…” WEDDING -来自瓦格纳的歌剧《罗恩格林》中的《婚礼合唱》。 FUNERAL -“葬礼进行曲”即肖邦的《降b小调第二钢琴奏鸣曲》(Op. 35)第三乐章。 PUNCHLINE - 一个表示笑话的有趣片段已经制作完成。 PYTHON - 约翰·菲利普·苏萨的进行曲又名“自由钟”,巨蟒剧团的主题曲(之后Python 编程语言被命名) BADDY - 无声电影时代的入口的一个坏人。 CHASE - 无声电影时代的追逐现场。 BA_DING - 表示发生了一些事情的短信号。 WAWAWAWAA - 一个非常悲伤的长号 JUMP_UP - 用于游戏中,指示向上移动。 JUMP_DOWN - 用于游戏中,指示向下移动。 POWER_UP - 一场宣传,表示一项成就解锁。 POWER_DOWN - 一场悲伤的宣传,表示一项成就的丧失。
import random
display.show(str(random.randint(1, 6)))
获取一个1~6之间得随机数字,并且转化为字符通过屏幕显示
emakefunnames = ["Mary", "Yolanda", "Damien", "Alia", "Kushal", "Mei Xiu", "Zoltan" ]
display.scroll(random.choice(emakefunnames))
在列表emakefunnames中随机获取一个名字,并且通过microbit屏幕显示出来
sleep(ms)
睡眠(延时)时间为给定的毫秒数。
running_time()
返回micro:bit最后一次启动的时间,返回值是微秒
reset()
复位micro:bit
micropython 扩展函数
Microbit 除了一些常用的 API函数之外,对于其它的一些microbit扩展板,比如:motorbit、magicbit和sensorbit传感器套件等、 micropython 内部的固件都做了相应的设计,使得用户在使用这些外设的时候,不用再被复杂的数据计算和代码所困扰,提高了外设的可操作性。
RGB特效灯
RGB灯可以通过调节红、绿、蓝 三基色的比例从而显示不同的颜色。当很多RGB灯连接在一起时,可以做一些特效,比如流水灯,呼吸灯等。
- 在使用RGB特效扩展函数时:需要在程序开始编写import neopixel,从而调用neopixel扩展函数
- 基本API(英文版)基本API(中文版)
- 扩展API:
1. 调节RGB灯亮度:brightness(pin_start, pin_end, brightness)
pin_start: 0~pin_end (控制亮度开始的坐标) , pin_end: pin_start~RGB_number (控制亮度结束的坐标) , brightness:1~100 (亮度值)
# 控制连接在microbit p16引脚的2颗RGB灯, 位置为0~1的RGB灯亮度设置为90
from microbit import *
import neopixel
np = neopixel.NeoPixel(pin16, 2) #设置RGB连接在microbit 16引脚,数量为2个
np[0] = (100, 100, 100) #设置第一个灯红、绿、蓝三种颜色的值
np[1] = (100, 100, 100) #设置第二个灯红、绿、蓝三种颜色的值
np.brightness(0, 1, 90)
- 呼吸灯特效:
breathing(pin_start, pin_end)pin_start: 0~pin_end (呼吸灯特效开始的坐标) , pin_end: pin_start~RGB_number (呼吸灯特效结束的坐标)
# 控制连接在microbit p16引脚的2颗RGB灯, 位置为0~1的RGB灯呼吸特效
from microbit import *
import neopixel
np = neopixel.NeoPixel(pin16, 2)
np[0] = (100, 100, 100)
np[1] = (100, 100, 100)
np.breathing(0, 1)
- 旋转流星特效:
rotate(pin_start, pin_end)pin_start: 0~pin_end (旋转流星特效开始的坐标) , pin_end: pin_start~RGB_number (旋转流星特效结束的坐标)
# 控制连接在microbit p16引脚的2颗RGB灯, 位置为0~1的RGB灯旋转流星特效
from microbit import *
import neopixel
np = neopixel.NeoPixel(pin16, 2)
np[0] = (100, 100, 100)
np[1] = (100, 100, 100)
np.rotate(0, 1)
- 闪烁特效:
flicker(pin_start, pin_end)pin_start: 0~pin_end (闪烁特效开始的坐标) , pin_end: pin_start~RGB_number (闪烁特效结束的坐标)
# 控制连接在microbit p16引脚的2颗RGB灯, 位置为0~1的RGB灯闪烁特效
from microbit import *
import neopixel
np = neopixel.NeoPixel(pin16, 2)
np[0] = (100, 100, 100)
np[1] = (100, 100, 100)
np.flicker(0, 1)
Magic:bit 扩展函数
Magicbit 是一款多功能的 Microbit 驱动板( Magicbit产品介绍),同时支持 8 路舵机和 4 路直流电机、支持2路4线步进电机、并且板载4个RGB全彩灯、无源蜂鸣器、红外接收头等。对于 Magicbit 的一些外设,micropython 内部的固件也做了一些设计,在使用 python 编程的过程中,可以直接使用这些micropython 扩展函数。
- 在使用这些函数时:import motor 需要首先编写这个语句,来调用扩展函数
- 扩展API :
1. 直流电机控制: motor.dcmotor_run(index, speed)
index: 1/2/3/4(电机序号), speed: -255~255 (电机速度)
#1号电机以150的速度正转
import motor
motor.dcmotor_run(1, 150)
- 直流电机停止:
motor.dcmotor_stop(index)index: 1/2/3/4 (电机序号)
# 1号电机以150速度运行2秒后,停止1号电机转动
from microbit import *
import motor
motor.dcmotor_run(1, 150)
sleep(2000)
motor.dcmotor_stop(1)
- 步进电机运动:
motor.stepper(index, degree)index: 1/2 (步进电机序号) , degree: -360~360 (转动角度)
# 控制1号步进电机转动150度
import motor
motor.stepper(1, 150)
- PWM舵机控制:
motor.servo(index, degree, speed=10)inedx: 1/2/3/4/5/6/7/8 (舵机序号,分别对应Magicbit:s1/s2/s3/s4/s5/s6/s7/s8) , degree: 0~180 (角度方位) , speed: 1~10(舵机转动速度, 可以不输入)
# 控制连接在S1引脚的舵机转动到90°位置
import motor
motor.servo(1, 90)
#控制连接在S1引脚的舵机以 5 速度转动到90°位置
import motor
motor.servo(1, 90, speed=5)
Motor:bit 扩展函数
Motor:bit 是易创空间专门针对 micro:bit 而开发的一款驱动大电流电机(Motorbit产品介绍)、舵机、步进电机的一款多功能电机驱动扩展板。采用DC-DC电源方案,支持DC(6~36V)宽电压输入,最大输出3A电流。Motor:bit 扩展函数可以参考Magic:bit
sensor 扩展函数
sensorbit 指的是一套传感器,对于该套传感器,每一个器件都设计有对应的函数,查看sensor 扩展函数