摇杆模块
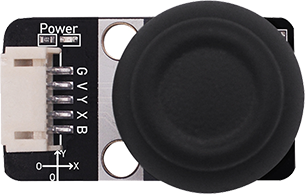
实物图
概述
PS2摇杆包含一个触摸按钮(B款没有)和两个电位器(X轴和Y轴)。 操纵杆根据两个触点控制运动,其中一个触点向左和向右,另一个向上和向下。 操纵杆移动决定了触点的位置,就像地球的纬度和经度一样,不同的位置对应不同的电压,然后控制器可以通过AD传感器读取不同的电压值,从而识别特定的远程位置。当没有操作时,X 和 Y 轴方向输出的模拟值为中间值,即最大值的一半。
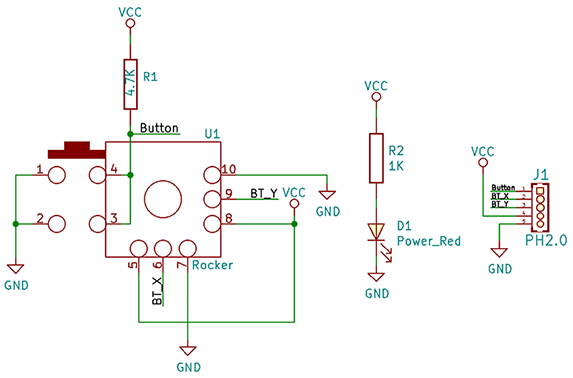
原理图
模块参数
| 引脚名称 | 描述 |
|---|---|
| G | GND |
| V | VCC |
| X | 获取摇杆上下动的数据 |
| Y | 获取摇杆左右动的数据 |
| B | 通过高低电平,判断按键是否被按下 |
-
供电电压:3V3/5V
-
连接方式:PH2.0 5PIN防反接线
-
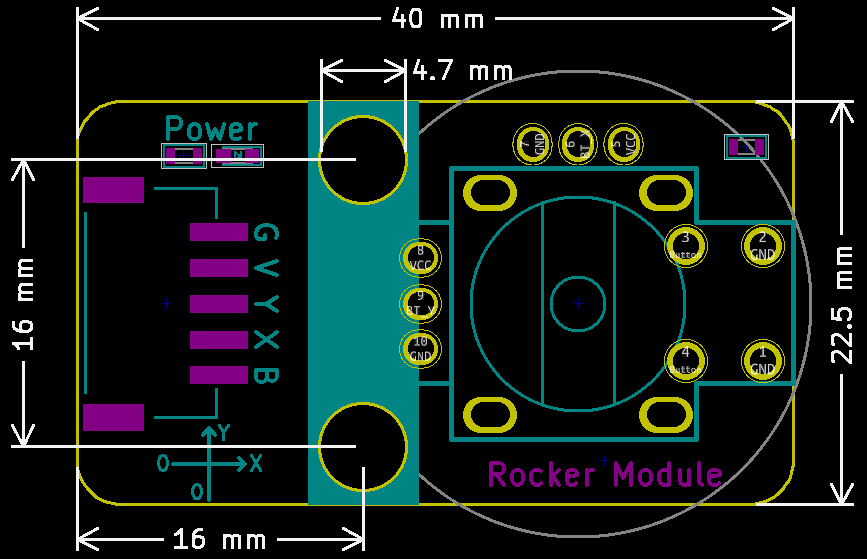
模块尺寸:40x22.5mm
-
安装方式:M4螺钉兼容乐高插孔固定
机械尺寸图
Arduino示例程序
#define JOYSTICK_X A5 //定义X输入引脚
#define JOYSTICK_Y A4 //定义Y输入引脚
#define JOYSTICK_B 2 //定义按键输入引脚
int value_x, value_y, value_b; //定义记录模拟输入的变量
void setup()
{
pinMode(JOYSTICK_X, INPUT); //初始化X引脚
pinMode(JOYSTICK_Y, INPUT); //初始化Y引脚
pinMode(JOYSTICK_B, INPUT_PULLUP); //初始化按键引脚
Serial.begin(9600); //设置波特率
}
void loop()
{
Serial.print("X Value:");
Serial.println(analogRead(JOYSTICK_X));//读取摇杆X轴值并打印出来
Serial.print("Y Value:");
Serial.println(analogRead(JOYSTICK_Y));//读取摇杆Y轴值并打印出来
if (digitalRead(JOYSTICK_B) == LOW) { //如果按键按下则打印enter
Serial.println("enter");//打印enter
}
delay(100);
}