RaspberryPi Motor Driver Board
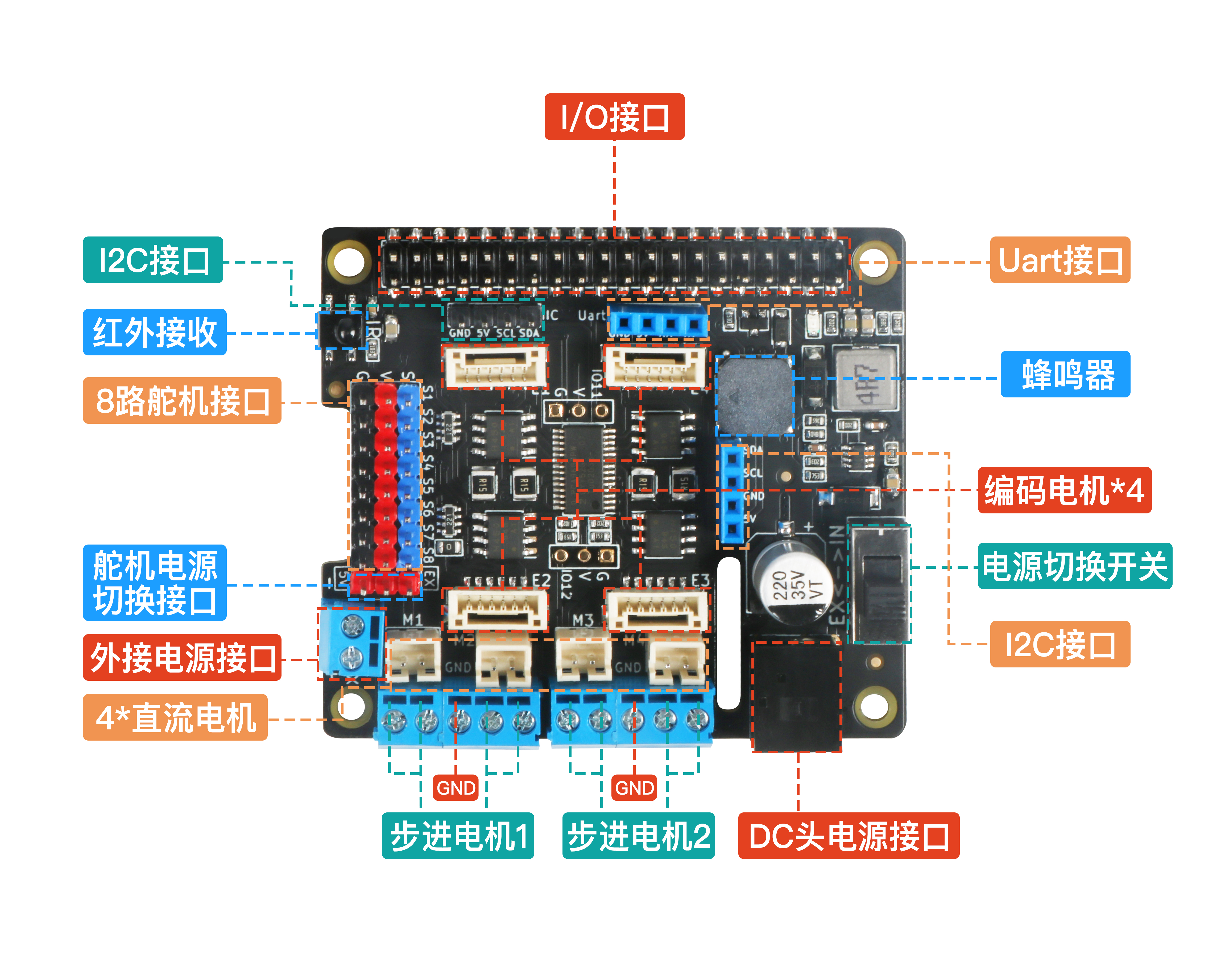
RaspberryPi 多功能电机驱动扩展板由深圳市易创空间科技有限公司出品的一款全功能的机器人电机驱动扩展版,适用于Raspberry Pi Zero/Zero W/Zero WH/A+/B+/2B/3B/3B+/4B。能够同时支持多路电机/步进电机/舵机/编码电机(Stepper/Motor/Servo/Encoder),空出摄像头和DIP显示屏排线接口,并且可以多板层叠使用扩展出更多的控制接口,特别适合玩家DIY机器人,智能小车,机械手臂,智能云台等各种应用。控制接口简单采用I2C接口,兼容3.3V/5V电平。
原理图
由于我们驱动板是使用I2C控制PCA9685芯片输出16路PWM,所有驱动直流电机或者舵机,不存在所谓的树莓派IO口和控制电机对应关系。
详情可以看 树莓派驱动板电路原理图 还可以查看驱动板正反面的丝印标注。
特点
- 双电源供电,5.5 ~ 2.1mmDC头或者3.5mm接线柱,供电电压6 ~ 25V,内置DC-DC稳压电路,为Raspberry Pi供电电流可达3A(建议使用7.4V航模电池)
- 驱动板IIC地址为0x60,地址可以由背面三个电阻决定
- 12位分辨率,可调PWM频率高达1.6KHz,可配置的推挽或开漏输出
- 支持同时驱动8路舵,3Pin(黑红蓝GVS)标准接口接线,方便连接舵机,舵机电源可切换到外部独立供电
- 支持4路6~24V直流电机,PH2.0接口或者3.5mm接线柱,电机单路输出高达电流3A
- 支持同时驱动2路4线步进电机
- 板载无源蜂鸣器,板载红外接收头
- 主板预留2个IIC扩展接口,1个串口接口
安装I2C库并使能
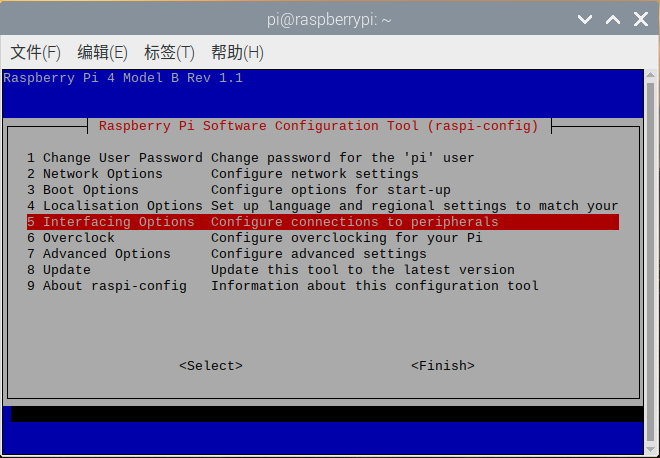
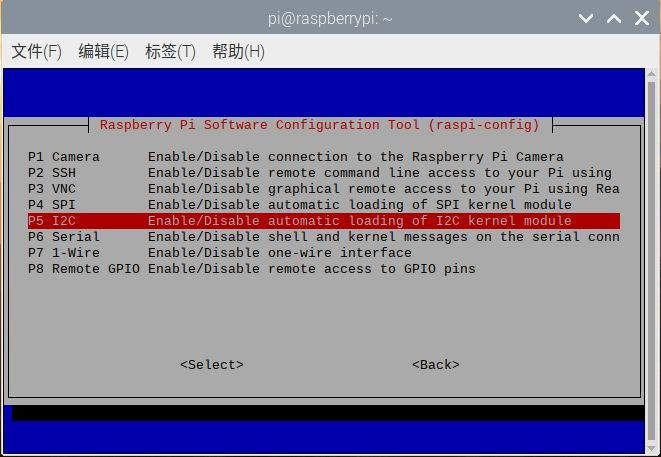
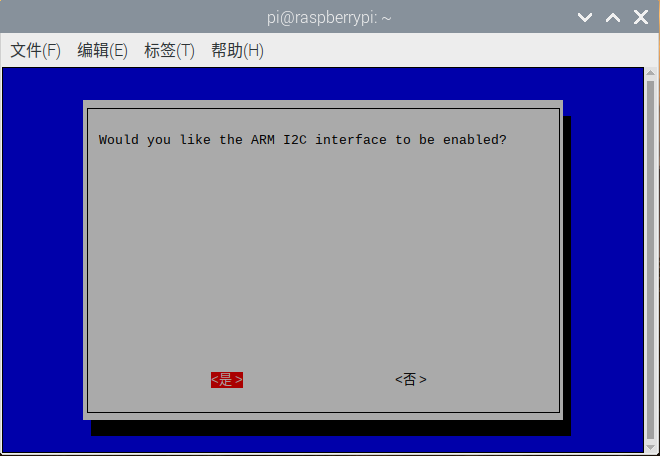
在使用驱动板之前,必须要先安装I2C库并使能。 打开树莓派终端输入"sudo raspi-config"命令,然后按照下图顺序依次操作即可。
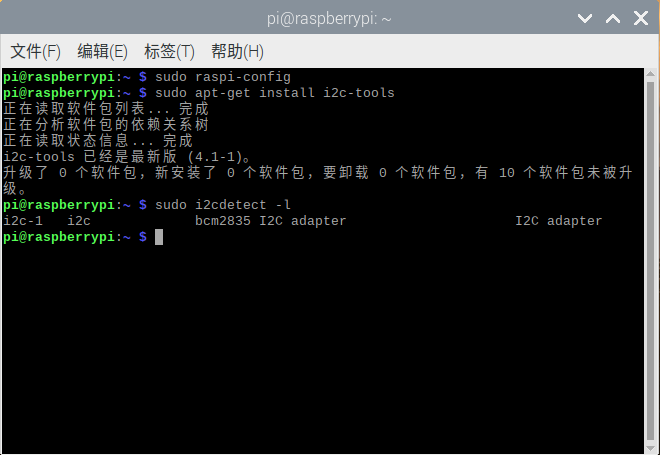
以上就是开启树莓派I2C,接下来我们安装树莓I2C库在终端输入“sudo apt-get install i2c-tools”,输入完成后就可以看到正在下载I2C库,安装完成之后可以在终端输入“sudo i2cdetect -l”检测是否安装正确,若出现类似于下面的信息就说明安装正常。
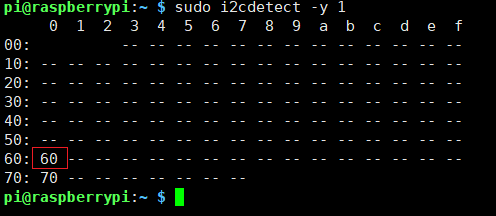
在终端输入“sudo i2cdetect -y 1”命令即可扫描接在I2C总线上的所有I2C设备,并打印出该设备的I2C总线地址,且我们的扩展板的I2C地址为0x60,如下图。
另外用i2cdetect检测出还有一个0x70地址一直存在,这是一个通用地址,可以给所有从机下达指令
重新启动树莓派,使新的设置生效:
sudo reboot
功能介绍
驱动舵机
C++代码
#include "Emakefun_MotorShield.h"
int main() {
Emakefun_MotorShield Pwm = Emakefun_MotorShield();
Pwm.begin(50);
// demo这里只操作舵机1, 其他舵机操作相同
Emakefun_Servo *myServo1 = Pwm.getServo(1);
// 速度值是 1 ~ 10 的正整数, 数值越大速度越快
int speed = 9;
while (true) {
// demo这里只操作舵机1, 其他舵机操作相同
myServo1->writeServo(0, speed);
delay(2000);
myServo1->writeServo(90, speed);
delay(2000);
myServo1->writeServo(180, speed);
delay(2000);
}
}
Python代码
#!/usr/bin/python
from Emakefun_MotorHAT import Emakefun_MotorHAT, Emakefun_Servo
import time
mh = Emakefun_MotorHAT(addr=0x60)
myServo = mh.getServo(1)
# 速度值是 1 ~ 10 的正整数, 数值越大速度越快
speed = 9
while (True):
# demo这里只操作舵机1, 其他舵机操作相同
myServo.writeServoWithSpeed(0, speed)
time.sleep(1)
myServo.writeServoWithSpeed(90, speed)
time.sleep(1)
myServo.writeServoWithSpeed(180, speed)
time.sleep(1)
驱动直流电机
C++代码
#include "Emakefun_MotorShield.h"
int main() {
Emakefun_MotorShield Pwm;
Emakefun_StepperMotor *StepperMotor_1 = Pwm.getStepper(200, 1);
Emakefun_StepperMotor *StepperMotor_2 = Pwm.getStepper(200, 2);
Pwm.begin(1600);
StepperMotor_1->setSpeed(400);
StepperMotor_2->setSpeed(400);
while (1) {
StepperMotor_1->step(200, FORWARD, DOUBLE); // 电机1正转1圈 200步
StepperMotor_1->release();
StepperMotor_2->step(200, FORWARD, SINGLE); // 电机2正转1圈 200步
StepperMotor_2->release();
delay(1000);
StepperMotor_1->step(200, BACKWARD, DOUBLE); // 电机1反转1圈 200步
StepperMotor_1->release();
StepperMotor_2->step(200, BACKWARD, SINGLE); // 电机2反转1圈 200步
StepperMotor_2->release();
delay(1000);
}
}
Python代码
#!/usr/bin/python
from Emakefun_MotorHAT import Emakefun_MotorHAT, Emakefun_DCMotor, Emakefun_Servo
import time
import atexit
# create a default object, no changes to I2C address or frequency
mh = Emakefun_MotorHAT(addr=0x60)
# recommended for auto-disabling motors on shutdown!
def turnOffMotors():
mh.getMotor(1).run(Emakefun_MotorHAT.RELEASE)
mh.getMotor(2).run(Emakefun_MotorHAT.RELEASE)
mh.getMotor(3).run(Emakefun_MotorHAT.RELEASE)
mh.getMotor(4).run(Emakefun_MotorHAT.RELEASE)
atexit.register(turnOffMotors)
################################# DC motor test!
myMotor = mh.getMotor(4)
# set the speed to start, from 0 (off) to 255 (max speed)
myMotor.setSpeed(150)
myMotor.run(Emakefun_MotorHAT.FORWARD);
# turn on motor
myMotor.run(Emakefun_MotorHAT.RELEASE);
while (True):
print ("Forward! ")
print ("\tSpeed up...")
for i in range(255):
myMotor.setSpeed(i)
myMotor.run(Emakefun_MotorHAT.FORWARD)
time.sleep(0.01)
print ("\tSlow down...")
for i in reversed(range(255)):
myMotor.setSpeed(i)
myMotor.run(Emakefun_MotorHAT.FORWARD)
time.sleep(0.01)
print ("Backward! ")
print ("\tSpeed up...")
for i in range(255):
myMotor.setSpeed(i)
myMotor.run(Emakefun_MotorHAT.BACKWARD)
time.sleep(0.01)
print ("\tSlow down...")
for i in reversed(range(255)):
myMotor.setSpeed(i)
myMotor.run(Emakefun_MotorHAT.BACKWARD)
time.sleep(0.01)
print ("Release")
myMotor.run(Emakefun_MotorHAT.RELEASE)
time.sleep(1.0)
驱动步进电机
C++代码
#include "Emakefun_MotorShield.h"
int main () {
Emakefun_MotorShield Pwm = Emakefun_MotorShield();
Pwm.begin(50);
Emakefun_StepperMotor *StepperMotor1 = Pwm.getStepper(200, 1);
while(1) {
StepperMotor1->setSpeed(30);
StepperMotor1->step(100, BACKWARD,SINGLE);
}
}
Python代码
#!/usr/bin/python
#import Raspi_MotorHAT, Raspi_DCMotor, Raspi_Stepper
from Emakefun_MotorHAT import Emakefun_MotorHAT, Emakefun_DCMotor, Emakefun_StepperMotor
import time
import atexit
# create a default object, no changes to I2C address or frequency
mh = Emakefun_MotorHAT(0x60)
# recommended for auto-disabling motors on shutdown!
def turnOffMotors():
mh.getMotor(1).run(Emakefun_MotorHAT.RELEASE)
mh.getMotor(2).run(Emakefun_MotorHAT.RELEASE)
mh.getMotor(3).run(Emakefun_MotorHAT.RELEASE)
mh.getMotor(4).run(Emakefun_MotorHAT.RELEASE)
atexit.register(turnOffMotors)
myStepper = mh.getStepper(200, 1) # 200 steps/rev, motor port #1
myStepper.setSpeed(30) # 30 RPM
while (True):
print("Single coil steps")
myStepper.step(100, Emakefun_MotorHAT.FORWARD, Emakefun_MotorHAT.SINGLE)
myStepper.step(100, Emakefun_MotorHAT.BACKWARD, Emakefun_MotorHAT.SINGLE)
print("Double coil steps")
myStepper.step(100, Emakefun_MotorHAT.FORWARD, Emakefun_MotorHAT.DOUBLE)
myStepper.step(100, Emakefun_MotorHAT.BACKWARD, Emakefun_MotorHAT.DOUBLE)
print("Interleaved coil steps")
myStepper.step(100, Emakefun_MotorHAT.FORWARD, Emakefun_MotorHAT.INTERLEAVE)
myStepper.step(100, Emakefun_MotorHAT.BACKWARD, Emakefun_MotorHAT.INTERLEAVE)
print("Microsteps")
myStepper.step(100, Emakefun_MotorHAT.FORWARD, Emakefun_MotorHAT.MICROSTEP)
myStepper.step(100, Emakefun_MotorHAT.BACKWARD, Emakefun_MotorHAT.MICROSTEP)
注意事项:
1、连接驱动板后,检查树莓派IIC,看是否检测到驱动板地址。链接
2、执行代码时,需将Github上代码下载到本地执行,上面只是部分示例。下载连接
3、树莓派用普通锂电池供电可能会出现树莓派重启的问题,建议使用7.4V航模电池。
4、可用该驱动板驱动精度不高的步进电机,驱动高精度步进电机时需接专用步进电机驱动。
5、该驱动板可接编码电机,代码正在更新......
6、为了步进电机顺畅不卡顿,最好提高树莓派I2C总线速度,具体操作步骤如下,将树莓派I2C速度设置为400K:
-
打开终端并编辑配置文件(需要root权限) /boot/config.txt
-
找到以下行:
#dtparam=i2c_arm=on -
将其取消注释并将其更改为:
dtparam=i2c_arm=on,i2c_arm_baudrate=400000 -
保存文件并重新启动树莓派