概述
| RUS-04(黑色款) | RUS-04蓝色款 |
|---|---|
 |
 |
产品简介
RUS-04是一款内置rgb彩灯,单总线超声波测距模块。 每个探头内部集成3颗WS2812彩灯,可通程序控制 rgb彩灯,模块在测距的同时,探头也能显示各种颜色。特别应用于玩具超声测距,机器人等应用。 2CM 超小盲区,4M 典型最远测距。采用自研超声波测距解调芯片,单总线,外围更加简洁,芯片内置高精度振荡器,无需额外晶振。驱动采用扫频技术,减少探 头本身一致性对模块灵敏度的影响。
模块参数对比
| 型号 | HC-04 | RUS-04(蓝色) | US-04 | RUS-04(黑色) |
|---|---|---|---|---|
| 图片 |  |
|
 |
|
| 工作电压 | 3~5.5V | 4.5V~5.5V | 3.5V~5.5V | 4.5V~5.5V |
| 功耗电流 | 3mA | 不开灯珠15mA 开灯珠65mA |
开灯珠65mA | 不开灯珠15mA 开灯珠65mA |
| RGB灯珠数量 | 0颗 | 6颗 | 6颗 | 0颗 |
| 谐振频率 | 40K | 40K | 40K | 40K |
| 探测距离范围 | 3.5~6米 | 2cm~4米 | 2cm~4米 | 2cm~4米 |
| 探测精度 | 1cm±2% | 1cm±2% | 1cm±2% | 1cm±2% |
| 探测角度 | < ±15-20° | < ±15-20° | < ±15-20° | < ±15-20° |
| 测量周期时间 | 200ms | 50ms | 50ms | 60ms |
| 工作温度范围 | -10℃~60℃ | -10℃~80℃ | -10℃~80℃ | -10℃~80℃ |
| 外形尺寸 | 45.2*20.4mm | 45.2*20.4mm | 48*24mm | 一款与RUS-04一样 二款与RUS-04(黑色款)一样 |
| 接口 | 4pin-2.54mm | PH2.0/Grove/插针接口 | PH2.0/Grove/RJ25接口 | PH2.0/Grove/RJ25接口 |
| 通讯引脚 | VCC/Trig/Echo/GND | G/V/IO/RGB | G/V/Trig/Echo | G/V/IO/RGB |
接口定义
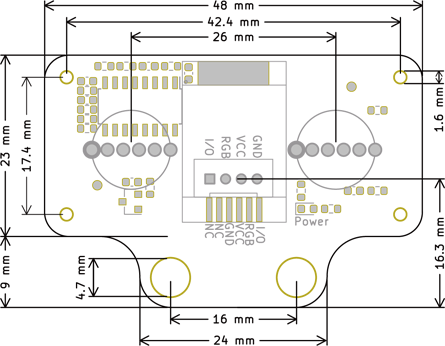
模块结构图
RUS-04(蓝色款)尺寸图
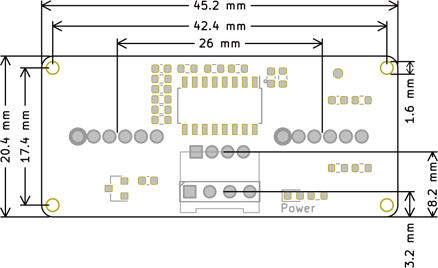
RUS-04(蓝色款)尺寸图
模块原理介绍
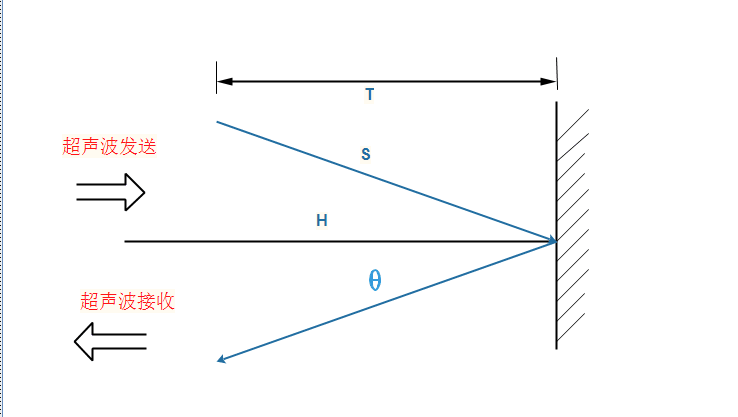
超声波部分测量操作
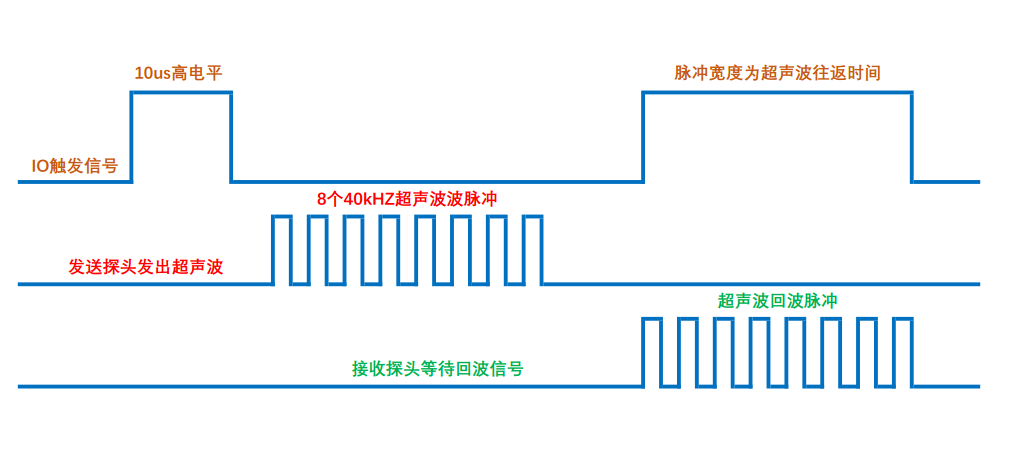
外部 MCU 初始设置为输出,给模块 I/O 脚一个大于 10uS 的高电平脉冲;输出脉冲信号后,MCU 设置 为输入模式,等待模块给出的一个与距离等比的高电平脉冲信号;测量结束后 MCU 设置为输出模式,进行下次测量。声速可根据脉宽时间“T”算出:
距离=T(从发送信号至接收到信号的时间)*340/2 ( 340m/s是声音在空气中的传播速度)
RGB灯珠介绍
RGB LED灯介绍
RUS-04为了使用方便采用了直接集成了LED驱动控制芯片的WS2812B-2020RGB灯珠,控制芯片内部包含了智能数字接口,数据锁存信号,整形放大驱动电路,还包含有高精度的内部振荡器和15V高压可编程定电流输出驱动器。
RUS-04收发探头分别各集成了3个RGB灯珠。只需一条信号线来控制各个RGB灯发光 Arduino需要控制探头的发光,需要专门的RGB库支持。
详情可以看 WS2812B规格书
应用注意
- 供电必须要要在4.5~5V之间否则 rgb灯控制不对
- 测量周期时间在60ms以上
- 在测量距离时,手或者其他金属物体不可接触探头,否则影响发射和接收波形从而导致距离测量错误
Arduino Uno示例程序
Mixly
ToDo